Investigacion Owli-AI
An Electronic Guide Dog for the Blind based on Artificial Neural Networks
(2021) - Paper
S. Lopatin; F. v. Zabiensky; M. Kreutzer; K. Rinn; D. Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Institute of Technology and Computer Science, Giessen, Germany
Aviso: esta pagina fue traducida automaticamente y esta pendiente de revision editorial.
Visual

Resumen
Este articulo presenta un estudio de viabilidad para un sistema electronico de asistencia destinado a apoyar a personas ciegas y con discapacidad visual en orientacion y navegacion en espacios publicos. El enfoque central es la deteccion optica de superficies transitables de acera mediante segmentacion semantica con una red neuronal entrenada desde cero. En la implementacion practica se utiliza un NVIDIA Jetson Nano como unidad de computo movil para inferencia en el dispositivo. A partir de la estructura de acera detectada se derivan indicaciones de navegacion que se entregan en salida de voz a la persona usuaria. El trabajo analiza asi la viabilidad tecnica de un perro guia electronico portatil basado en vision por computador y CNN.
Palabras clave
- electronic travel aid
- blind sidewalk detection
- portable ETA system
- electronic travel aid technology
- computer vision
- convolutional neural network
Descarga
Figuras
7 visuales del paper.
-
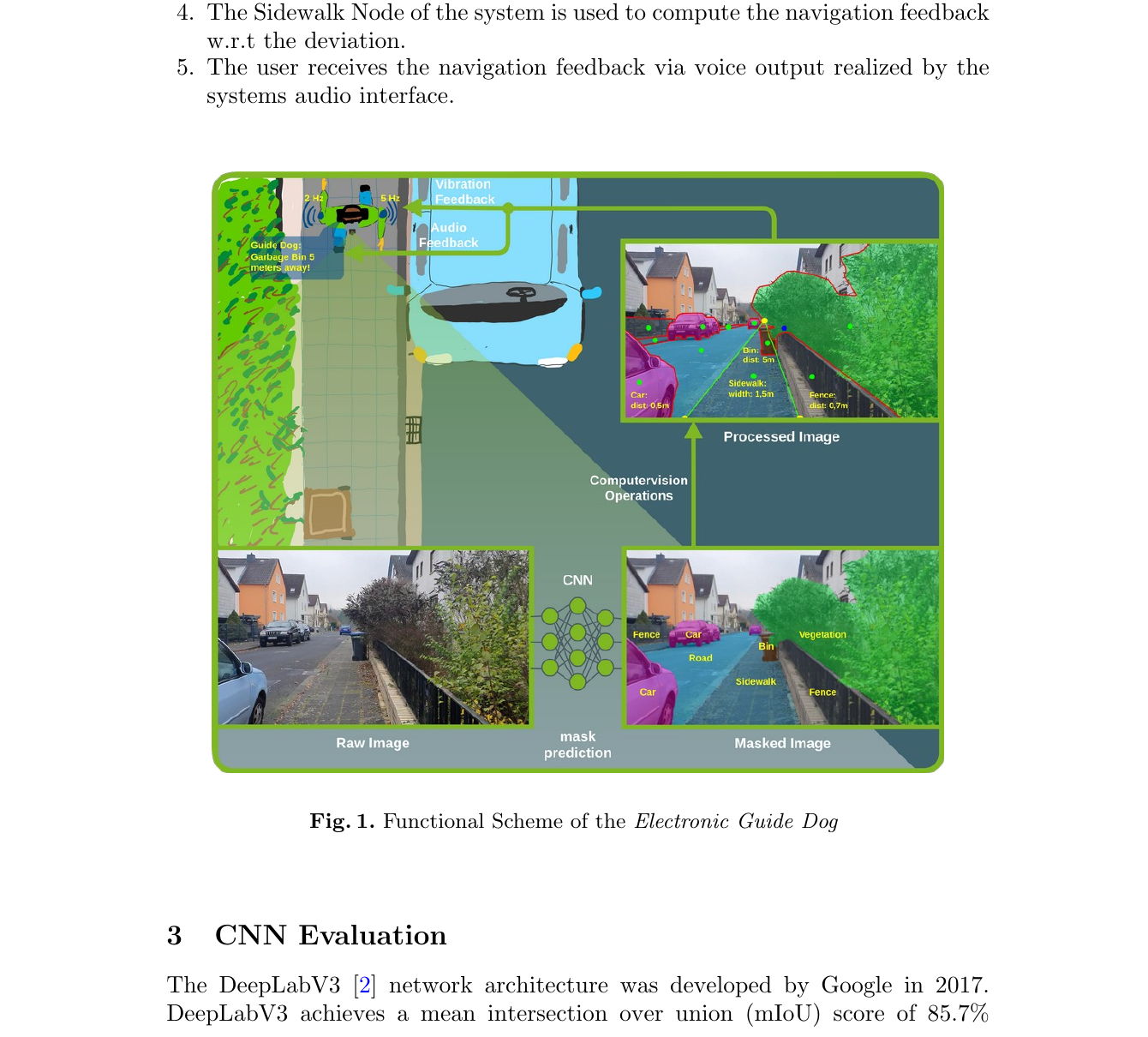
Fig. 1 Esquema funcional del Electronic Guide Dog. -
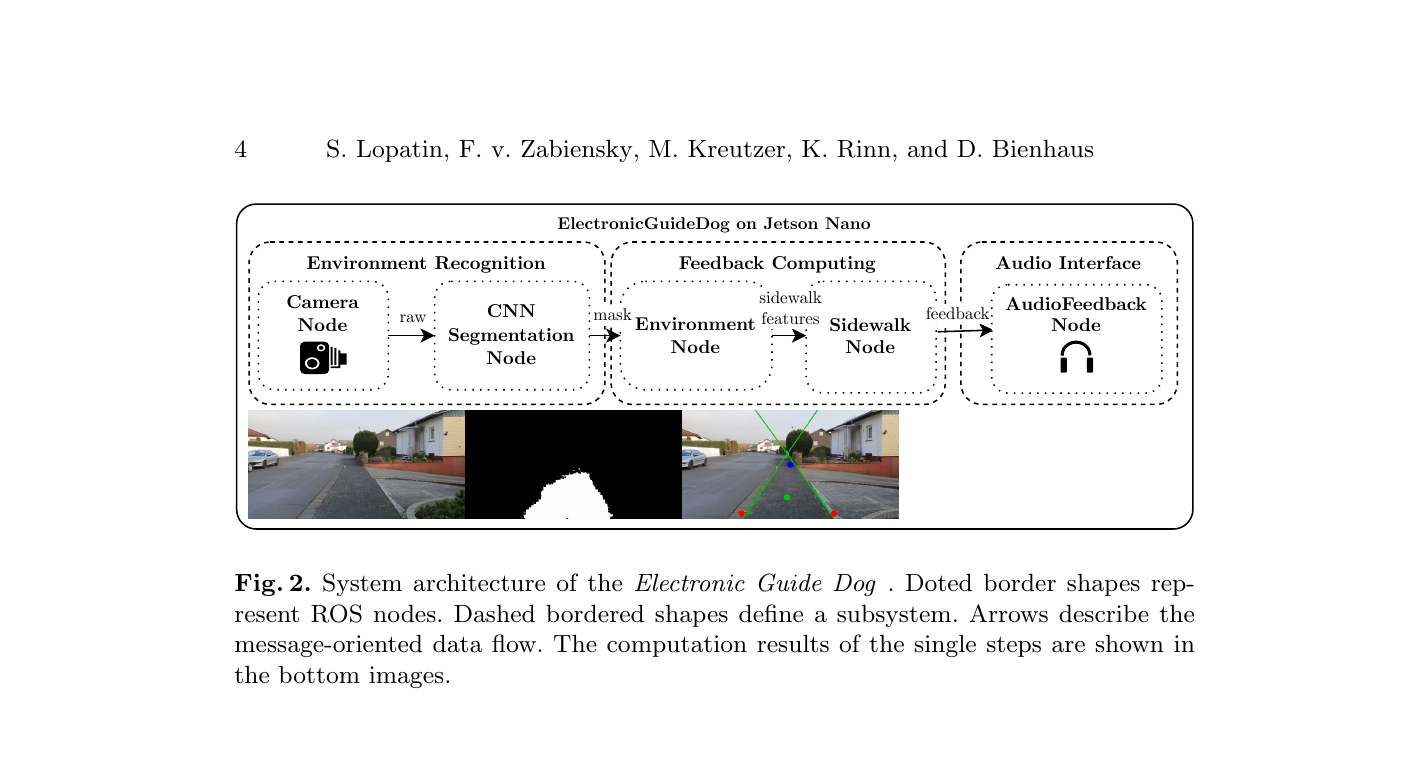
Fig. 2 Arquitectura del sistema con procesamiento basado en flujo de datos. -
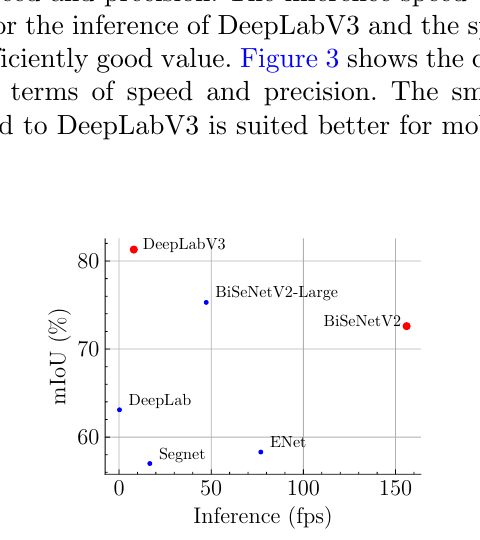
Fig. 3 Comparacion de velocidad y precision. -
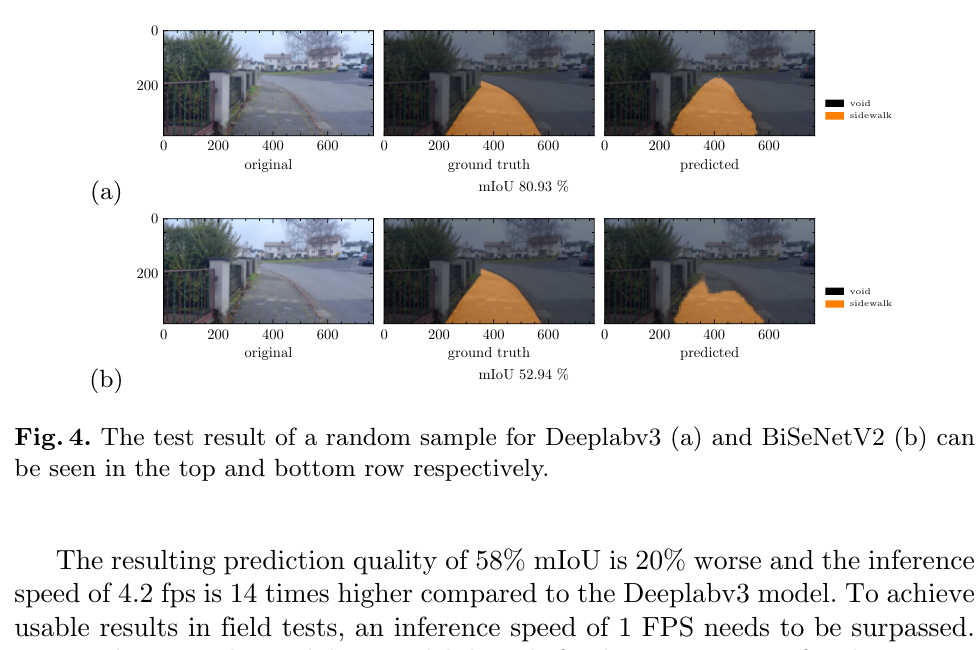
Fig. 4 Resultado comparativo de una muestra de prueba para DeepLabV3 y BiSeNetV2. -

Fig. 5 Parametros para calculo de desviacion respecto a la ruta optima. -
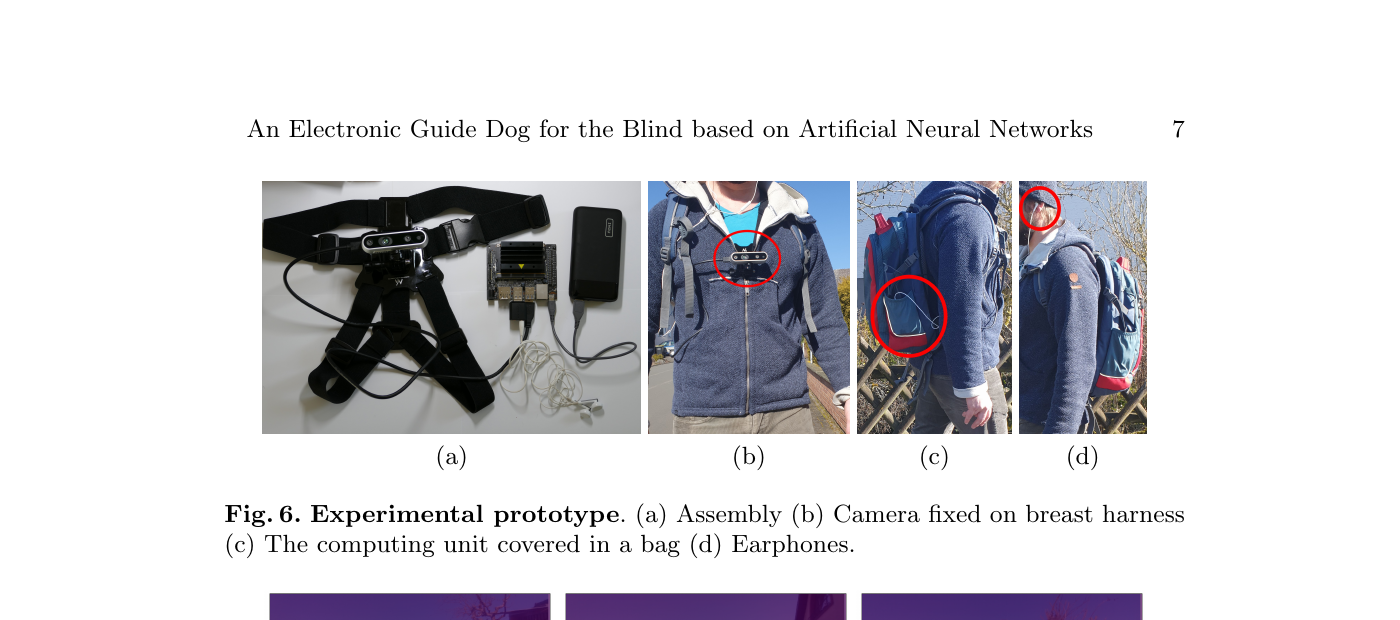
Fig. 6 Prototipo experimental en configuracion de prueba de campo. -
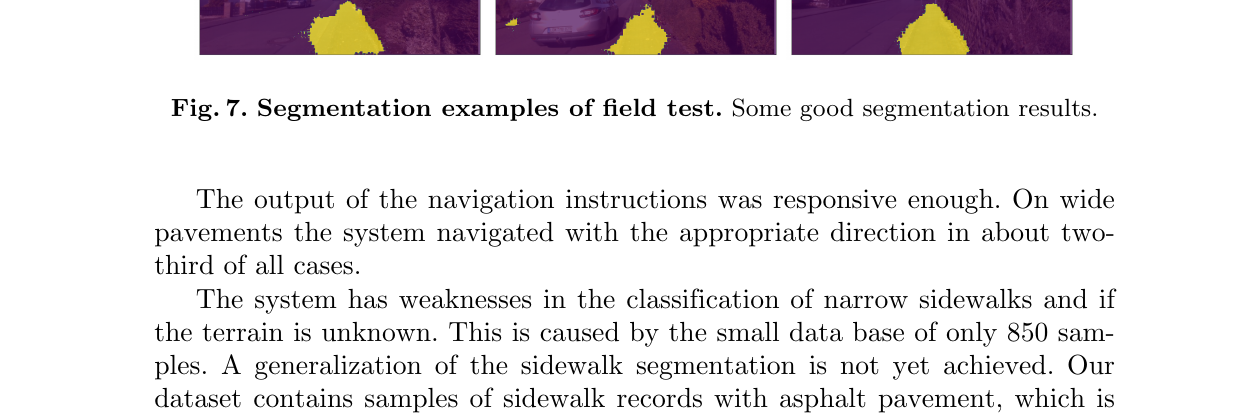
Fig. 7 Ejemplos de segmentacion en prueba de campo.





