Investigacion Owli-AI
A Framework for Developing Modular Mobility Aids for People with Visual Impairment: An Indoor Navigation Use Case
(2023) - Paper
Florian von Zabiensky; Grigory Fridman; Oguz Ozdemir; Sebastian Reuter; Michael Kreutzer; Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Giessen, Germany
Aviso: esta pagina fue traducida automaticamente y esta pendiente de revision editorial.
Visual

Resumen
Este articulo describe un framework para el desarrollo basado en componentes de electronic travel aids (ETAs), con el objetivo de reducir trabajo repetitivo en proyectos de investigacion. La contribucion central es un modelo para delimitar componentes, de modo que subfunciones como captura del entorno, deteccion de obstaculos y modalidades de salida puedan combinarse de forma intercambiable. Como validacion practica se implementa un sistema de navegacion interior basado en ultra-wideband (UWB). La implementacion usa el ecosistema ROS2 para aprovechar herramientas, interfaces y reutilizacion entre equipos. El articulo cierra con una reflexion sobre el proceso de desarrollo y una evaluacion de oportunidades y limites de ROS2 para prototipos ETA modulares.
Palabras clave
- ETA
- electronic travel aid
- mobility aid
- ROS2
- ROS
- robot operating system
- component-based development
Descarga
Figuras
5 visuales del paper.
-
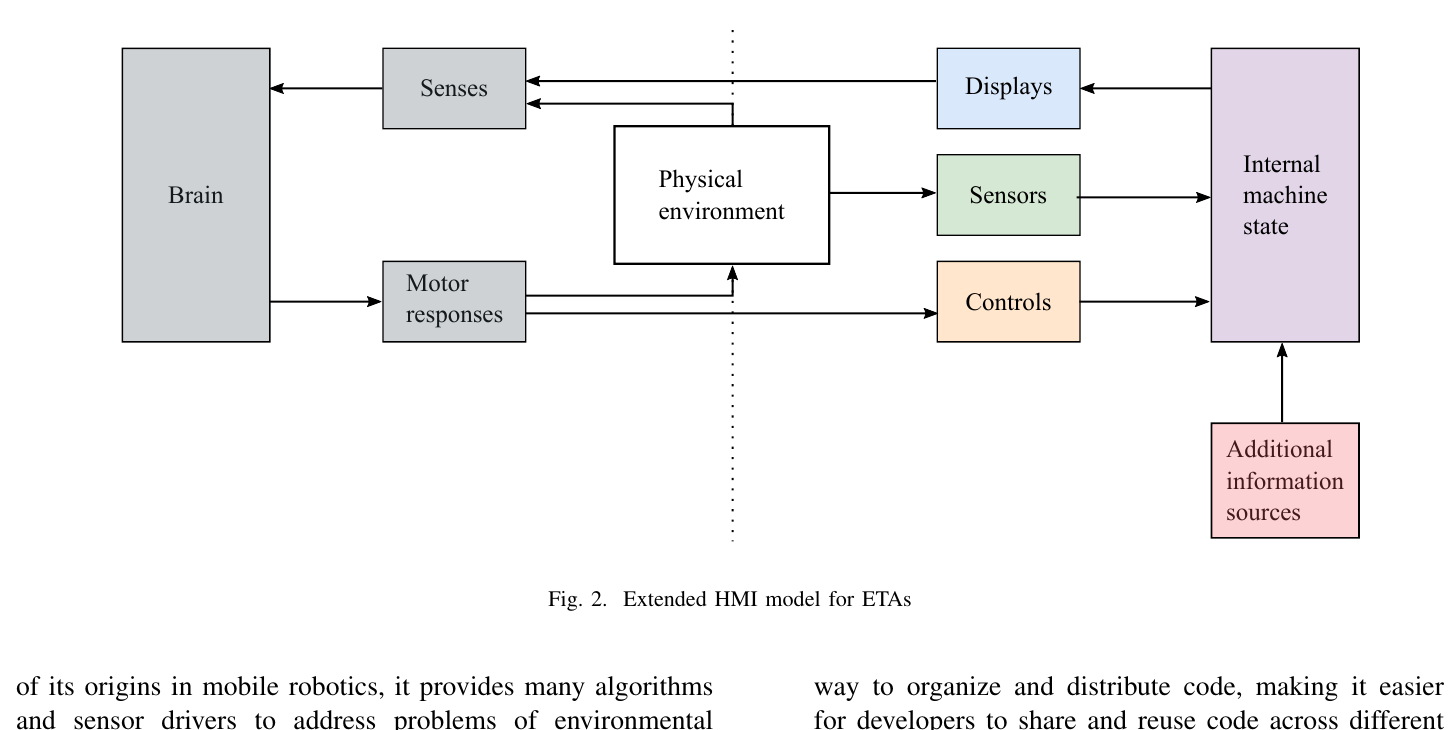
Fig. 2 Modelo HMI ampliado para electronic travel aids. -
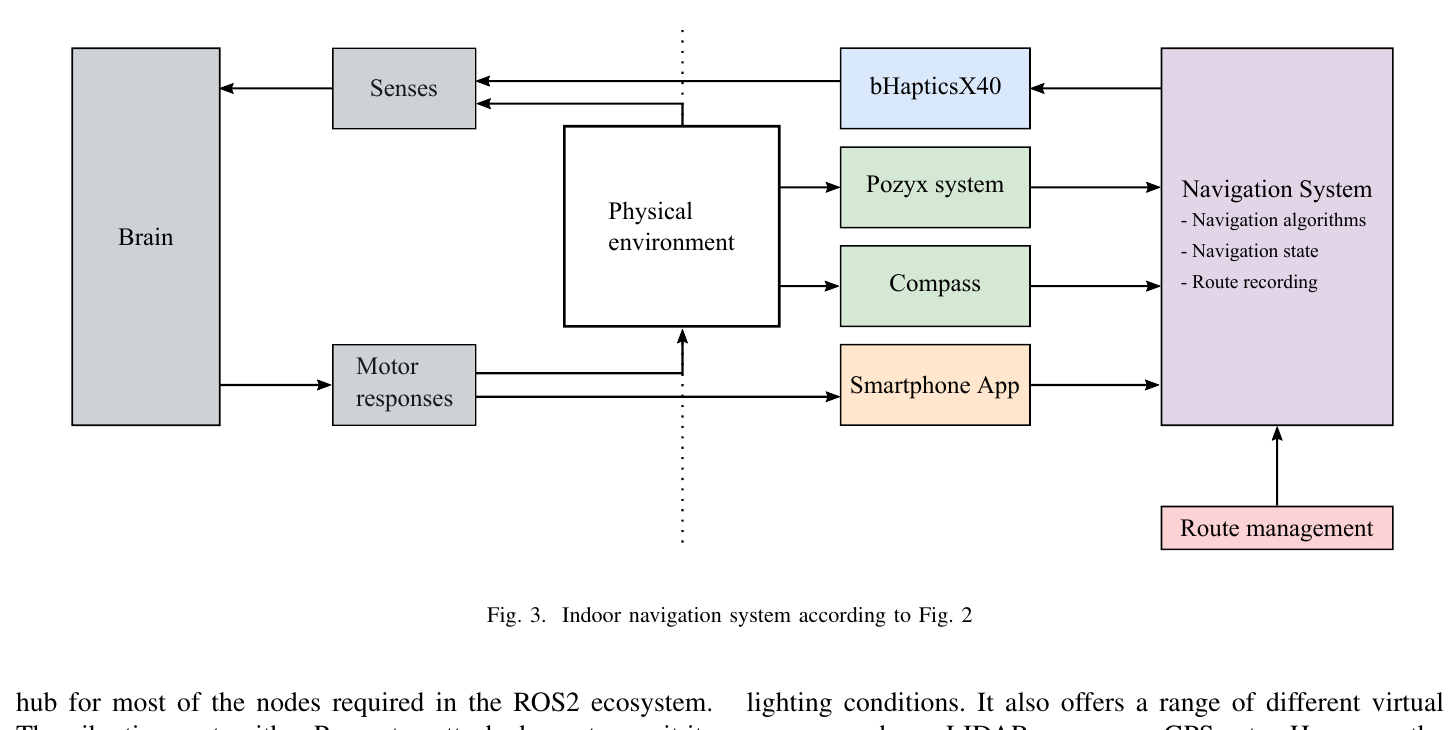
Fig. 3 Sistema de navegacion interior con componentes intercambiables. -
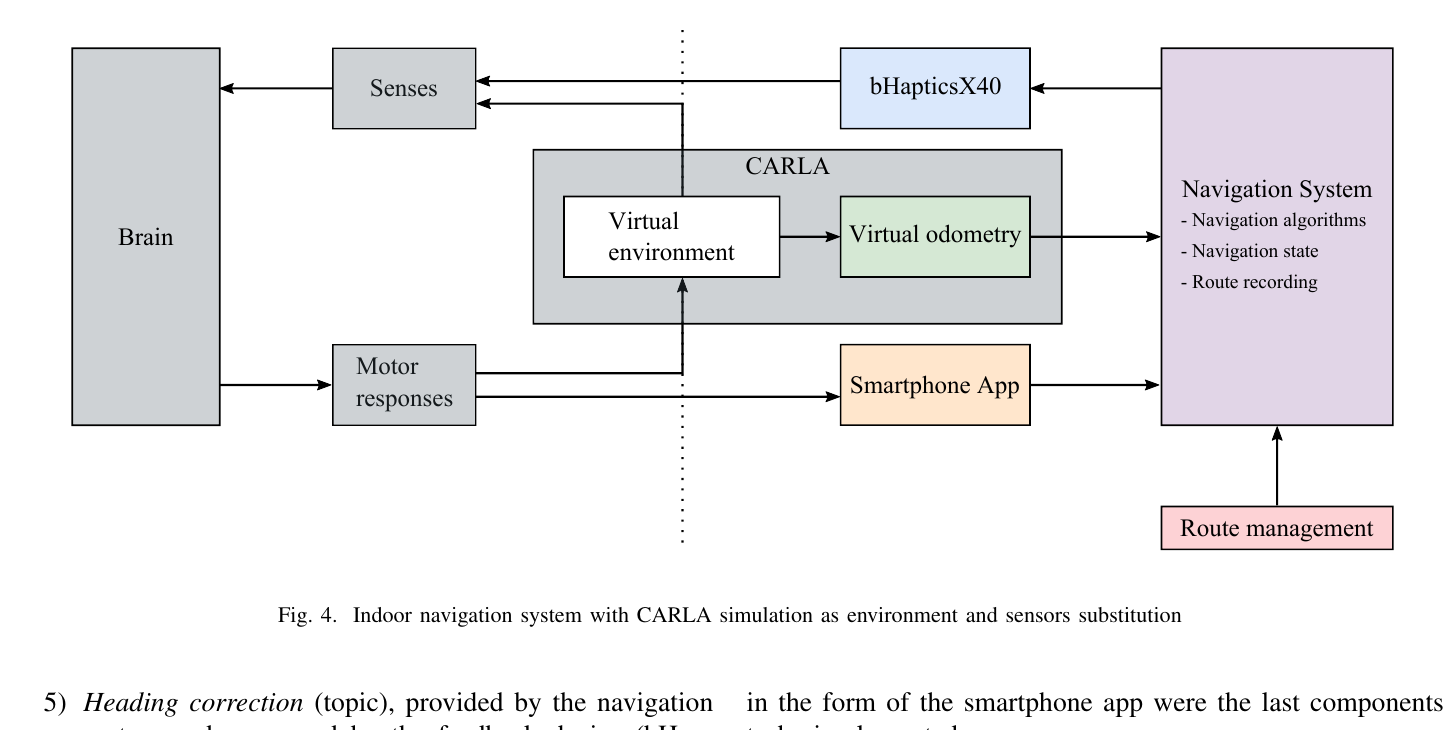
Fig. 4 Navegacion interior con CARLA como entorno de simulacion. -
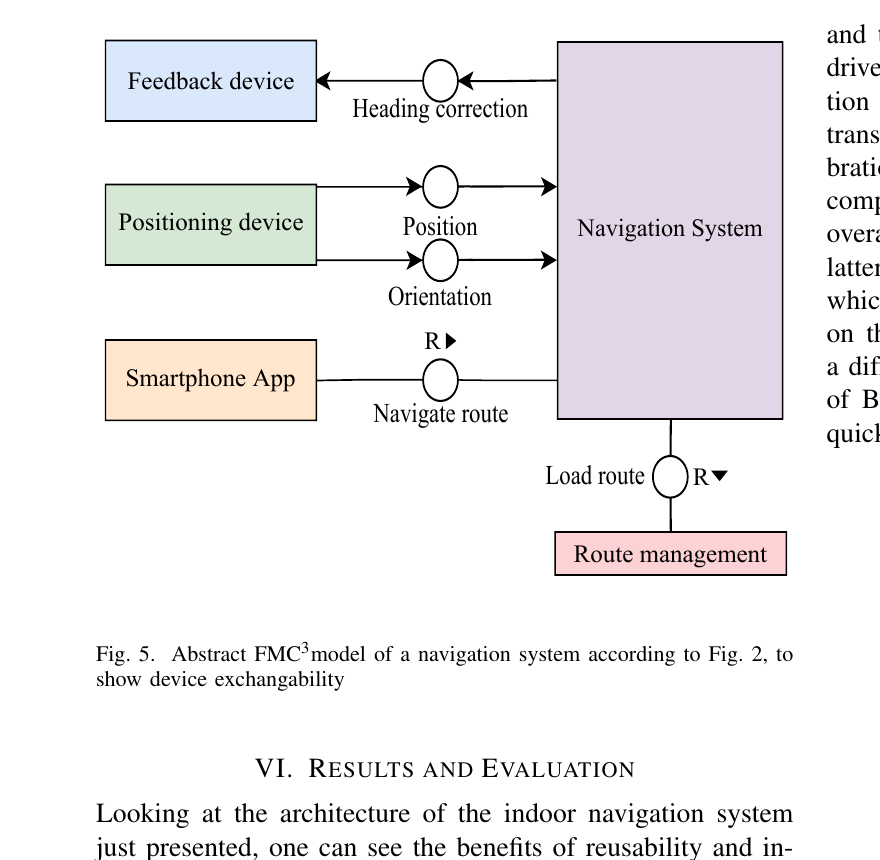
Fig. 5 Modelo FMC abstracto de un sistema de navegacion. -
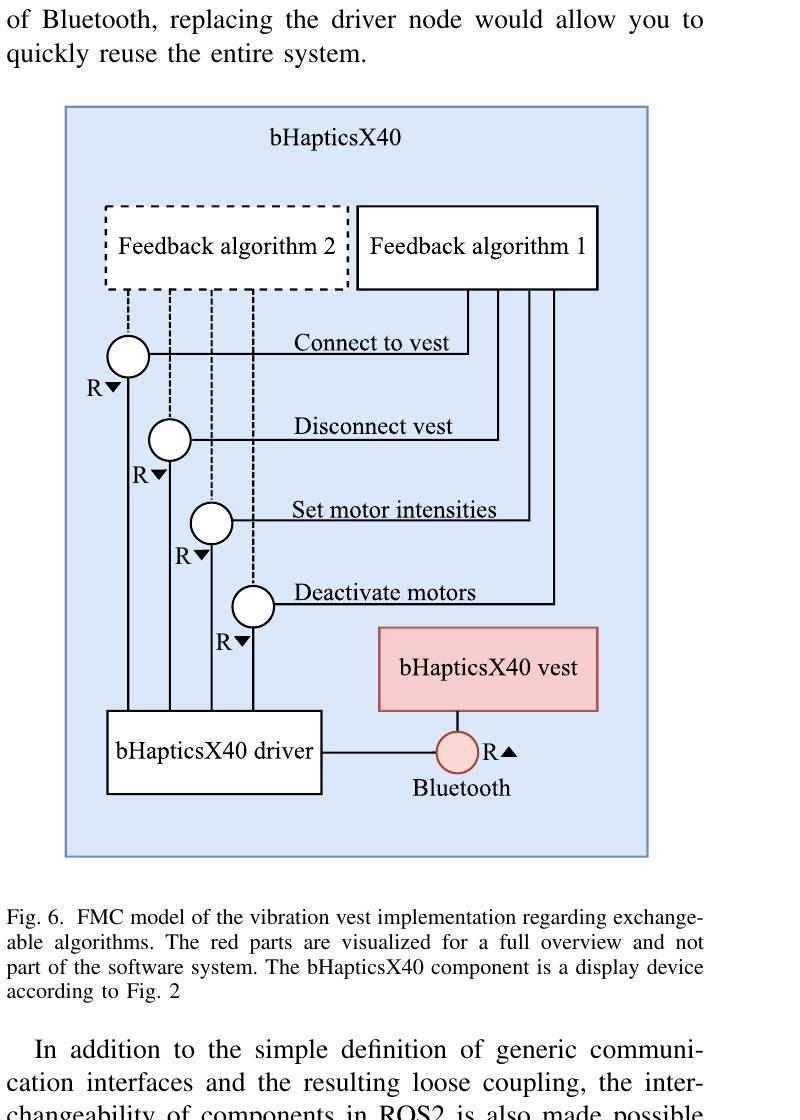
Fig. 6 Modelo FMC de la implementacion del chaleco bHapticsX40.



