Owli-AI Forschung
A Framework for Developing Modular Mobility Aids for People with Visual Impairment: An Indoor Navigation Use Case
(2023) - Paper
Florian von Zabiensky; Grigory Fridman; Oguz Ozdemir; Sebastian Reuter; Michael Kreutzer; Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Giessen, Germany
Visual

Abstract
Das Paper beschreibt ein Framework fuer die komponentenbasierte Entwicklung von Electronic Travel Aids (ETAs), um wiederkehrende Entwicklungsarbeit in Forschungsprojekten zu reduzieren. Kern des Ansatzes ist ein Modell zur Abgrenzung von Komponenten, damit Teilfunktionen wie Umgebungserfassung, Hinderniserkennung und Ausgabemodalitaeten austauschbar kombiniert werden koennen. Als praktischer Nachweis wird ein Indoor-Navigationssystem auf Basis von Ultra-Wideband (UWB) umgesetzt. Die Implementierung erfolgt im ROS2- Oekosystem, um bestehende Werkzeuge, Schnittstellen und Wiederverwendbarkeit zwischen Arbeitsgruppen zu nutzen. Abschliessend reflektiert die Arbeit den Entwicklungsprozess und bewertet Chancen sowie Grenzen von ROS2 fuer modulare ETA-Prototypen.
Keywords
- ETA
- electronic travel aid
- mobility aid
- ROS2
- ROS
- robot operating system
- component-based development
Download
Abbildungen
5 Visuals aus dem Paper.
-
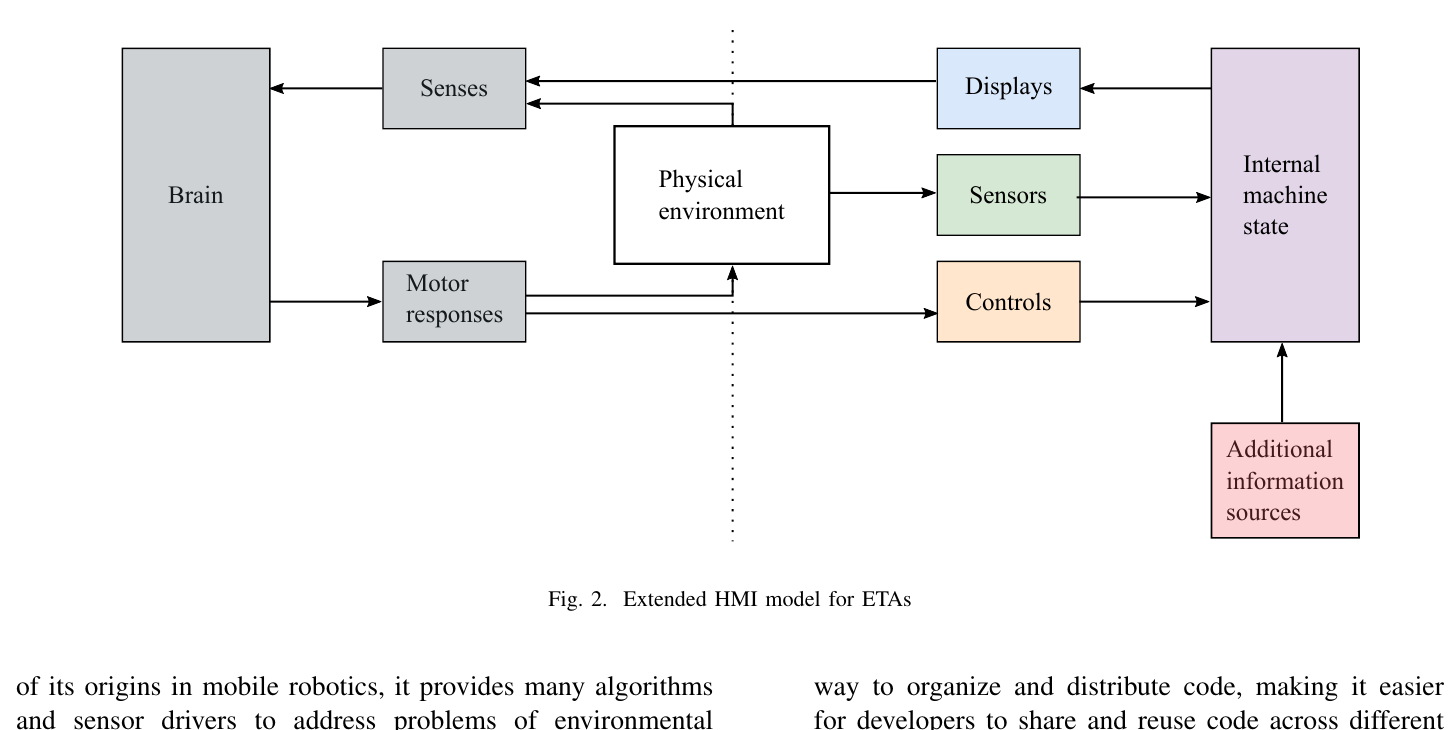
Fig. 2 Erweitertes HMI-Modell fuer Electronic Travel Aids. -
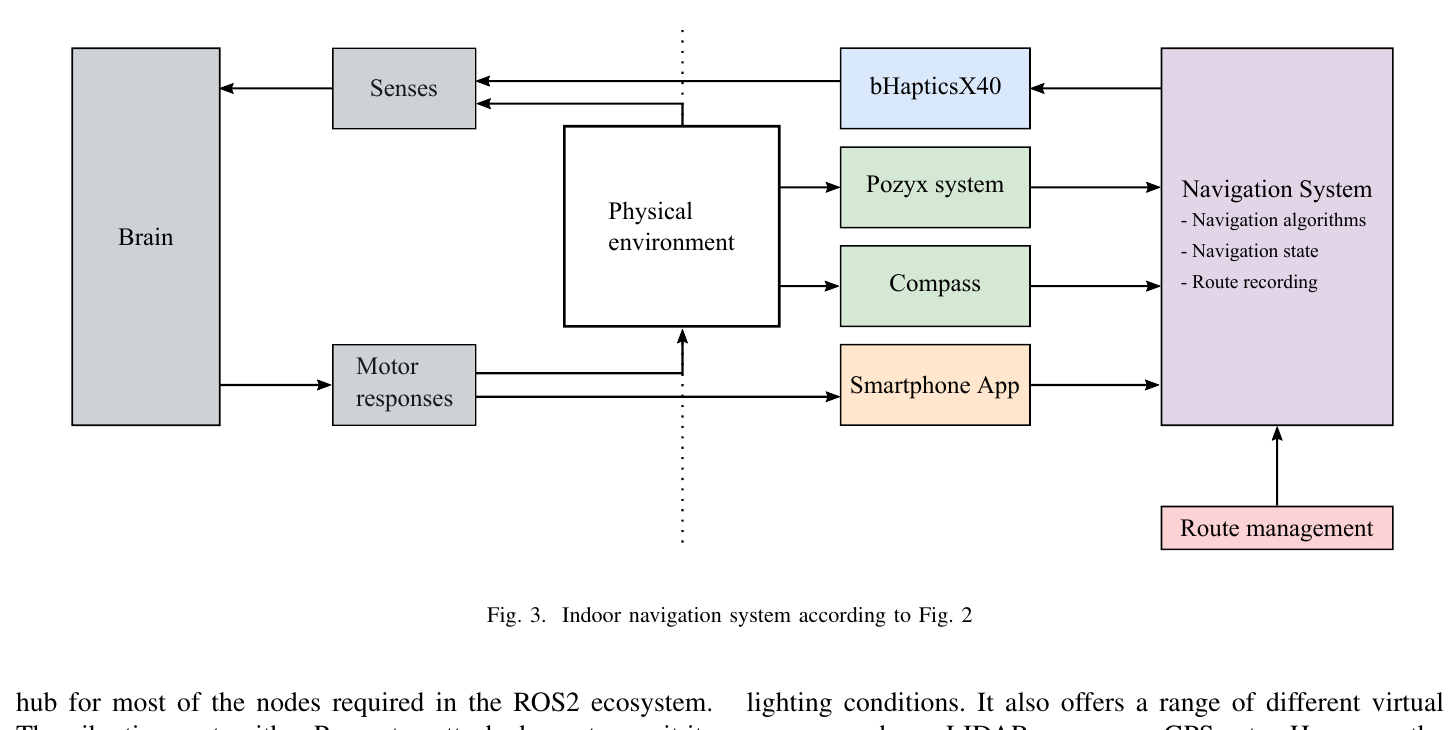
Fig. 3 Indoor-Navigationssystem mit austauschbaren Komponenten. -
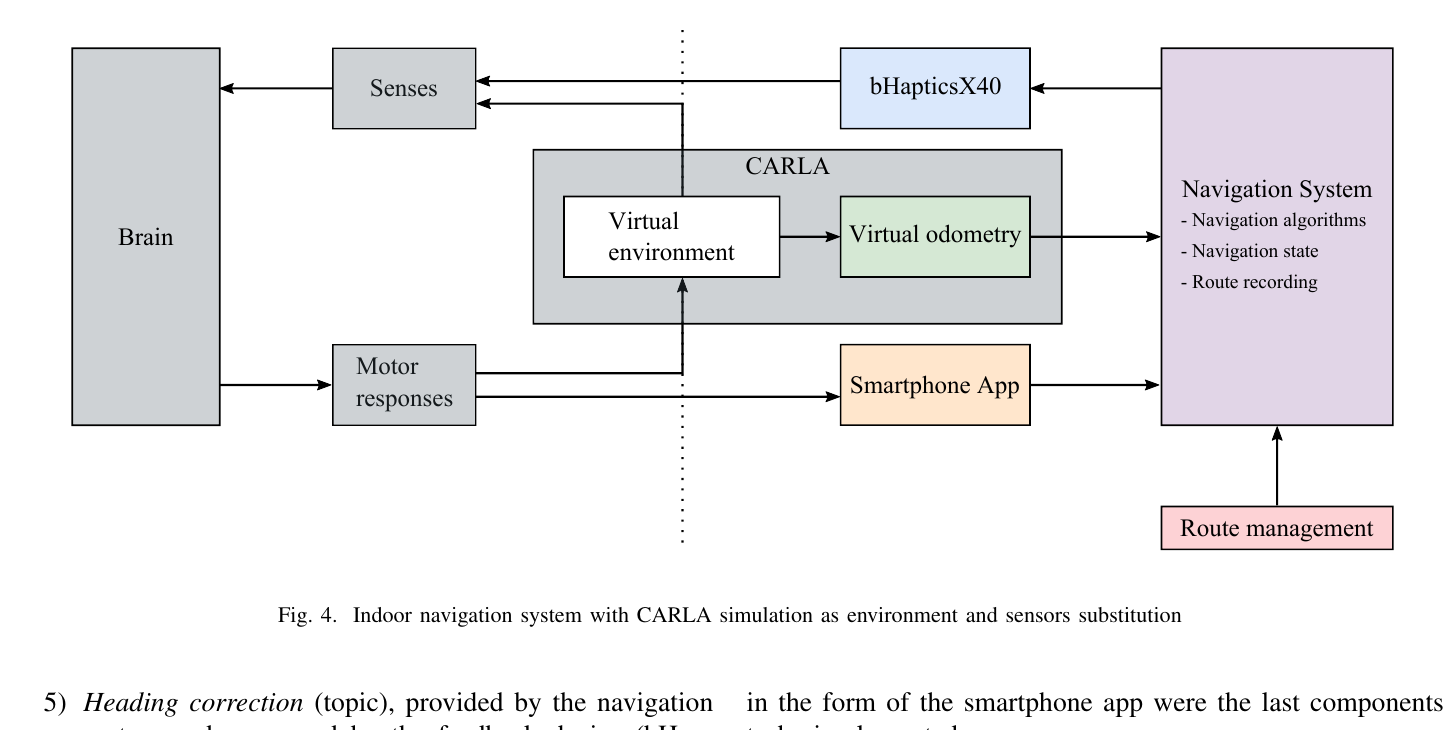
Fig. 4 Indoor-Navigation mit CARLA als Simulationsumgebung. -
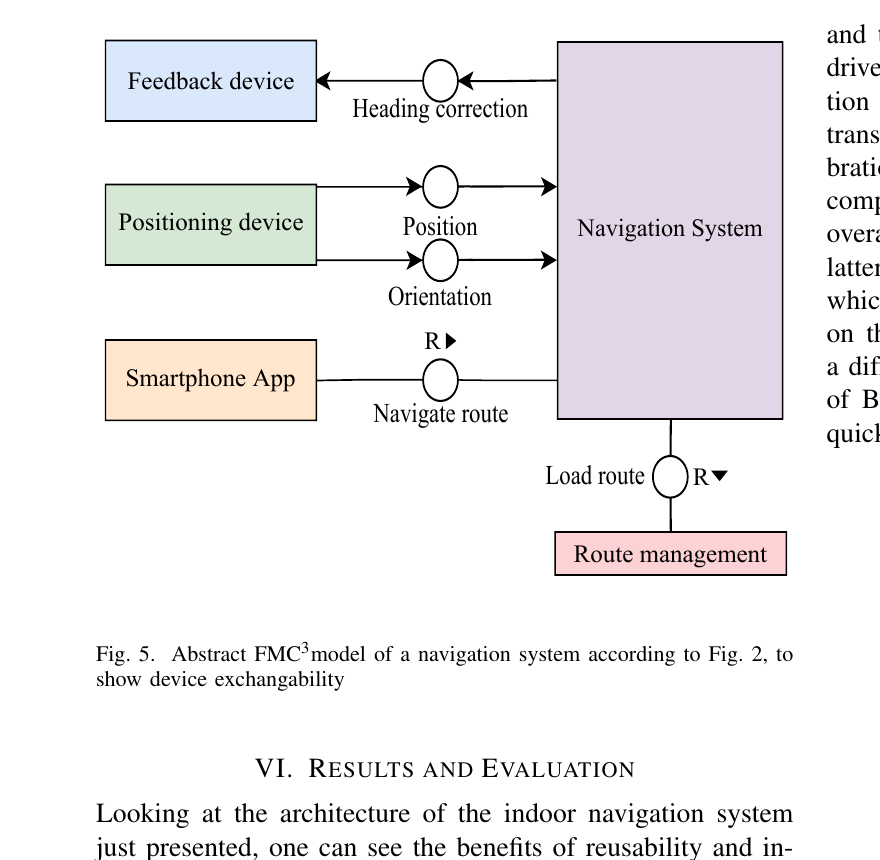
Fig. 5 Abstraktes FMC-Modell eines Navigationssystems. -
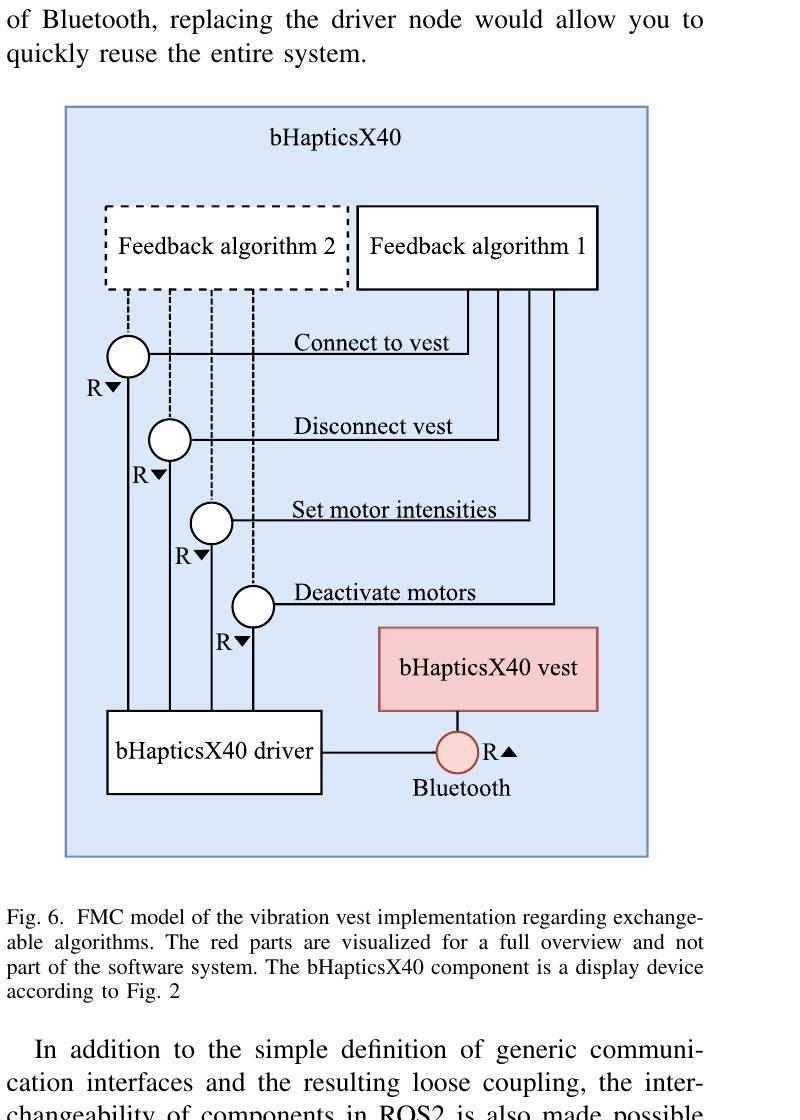
Fig. 6 FMC-Modell der bHapticsX40-Vest-Implementierung.



