Owli-AI Research
A Framework for Developing Modular Mobility Aids for People with Visual Impairment: An Indoor Navigation Use Case
(2023) - Paper
Florian von Zabiensky; Grigory Fridman; Oguz Ozdemir; Sebastian Reuter; Michael Kreutzer; Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Giessen, Germany
Notice: this page was machine-translated and is pending editorial review.
Visual

Abstract
This paper describes a framework for component-based development of electronic travel aids (ETAs) to reduce repetitive development effort in research projects. The core contribution is a component delimitation model that allows interchangeable combination of subfunctions such as environment sensing, obstacle detection, and output modalities. As practical validation, an indoor navigation system based on ultra-wideband (UWB) is implemented. Implementation uses the ROS2 ecosystem to leverage existing tooling, interfaces, and reuse across teams. The paper concludes with reflections on the development process and an assessment of opportunities and limitations of ROS2 for modular ETA prototypes.
Keywords
- ETA
- electronic travel aid
- mobility aid
- ROS2
- ROS
- robot operating system
- component-based development
Download
Figures
5 visuals from the paper.
-
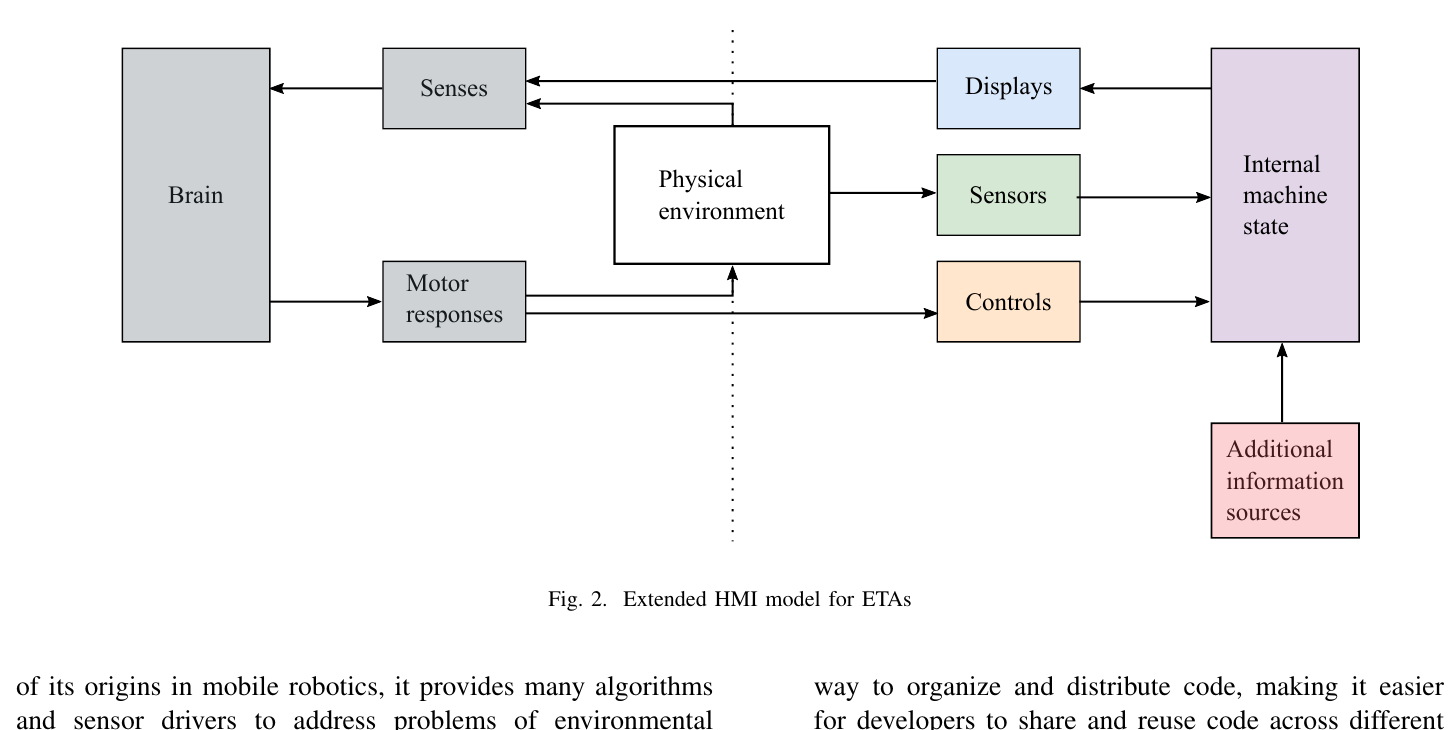
Fig. 2 Extended HMI model for electronic travel aids. -
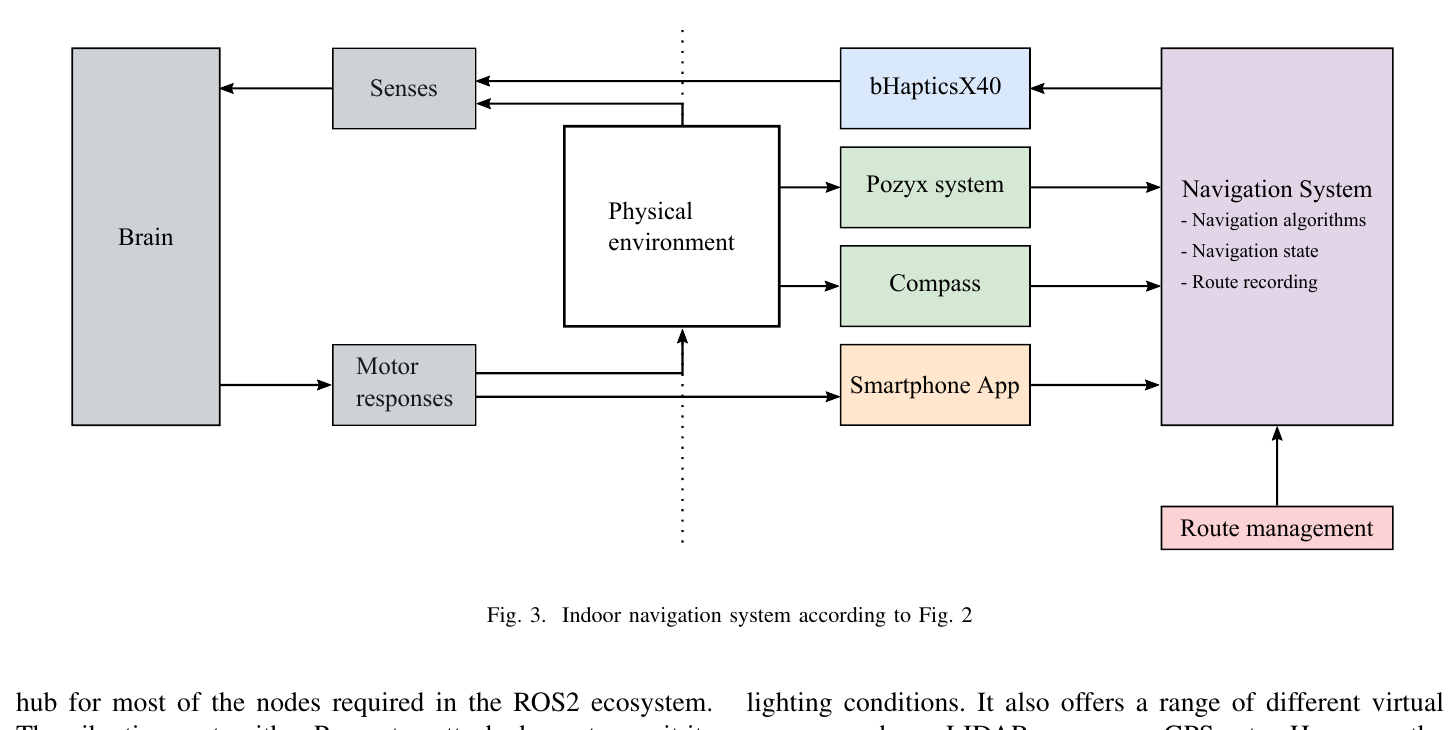
Fig. 3 Indoor navigation system with interchangeable components. -
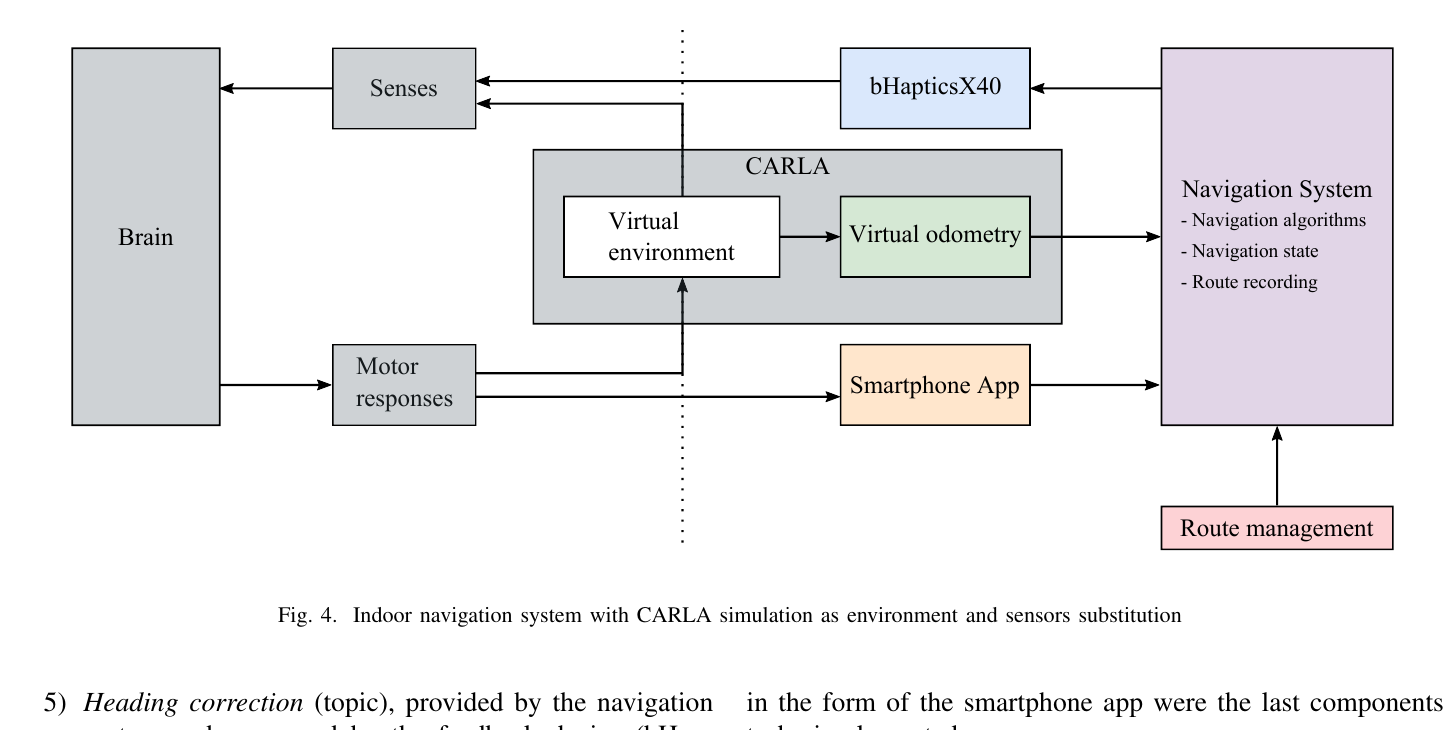
Fig. 4 Indoor navigation with CARLA as simulation environment. -
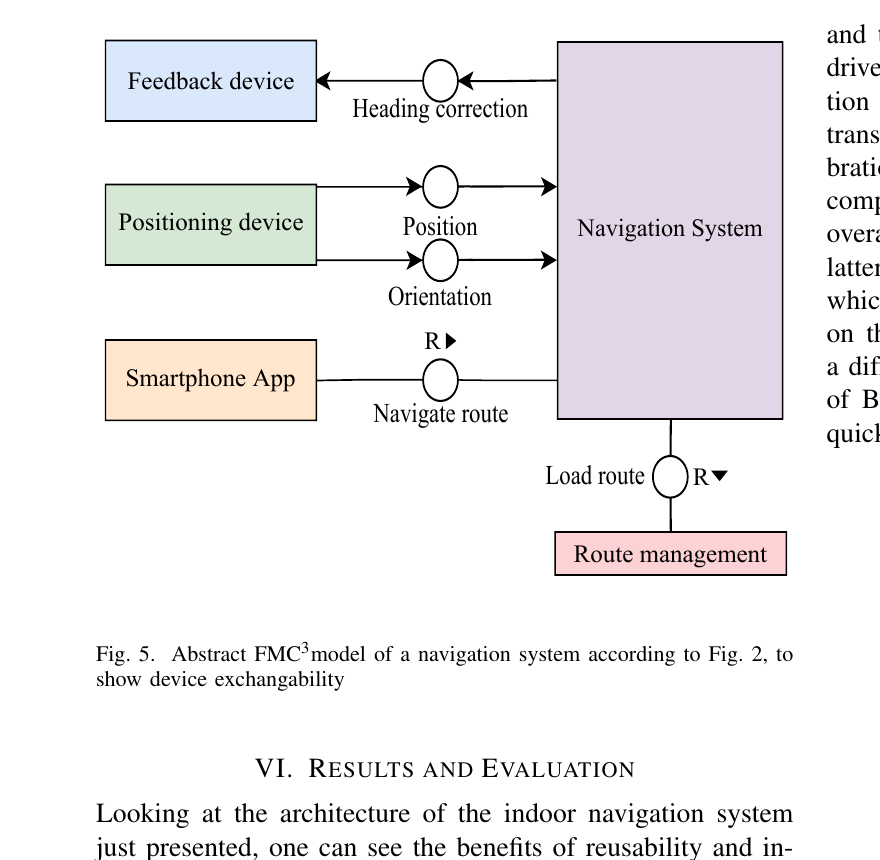
Fig. 5 Abstract FMC model of a navigation system. -
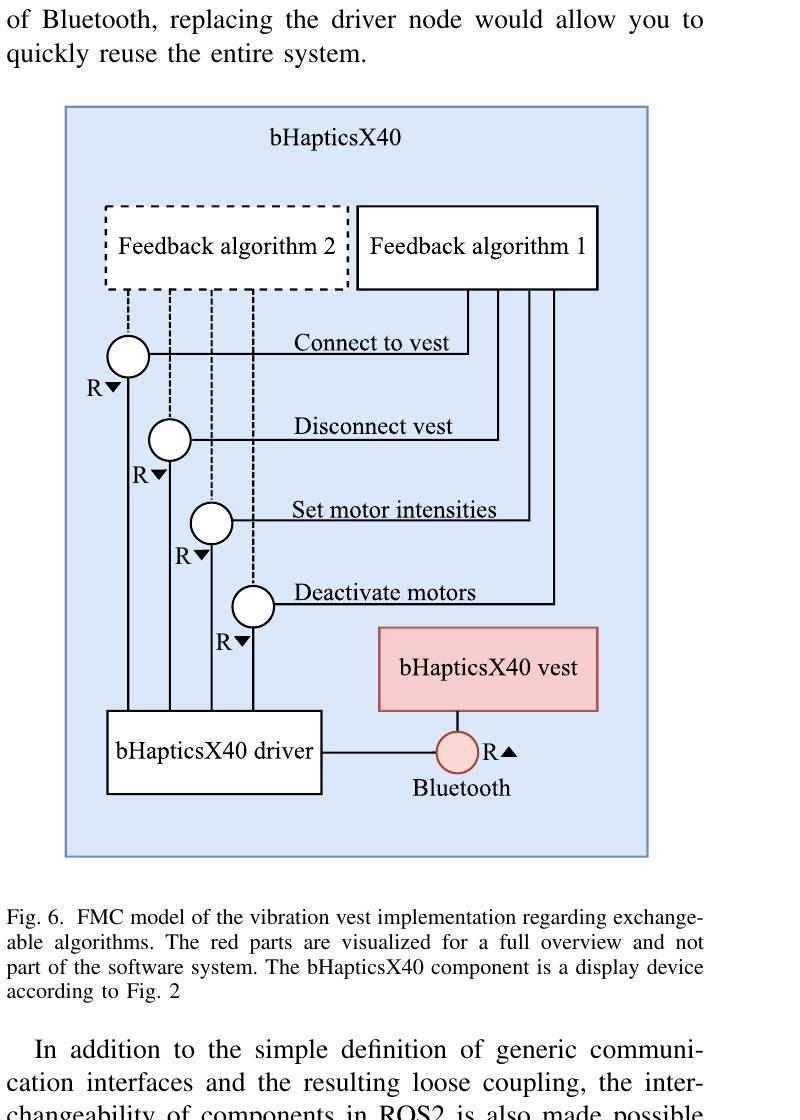
Fig. 6 FMC model of bHapticsX40 vest implementation.



