Owli-AI Research
Ultrasonic Waves to Support Human Echolocation
HCII (2018) - Paper
Florian von Zabiensky; Michael Kreutzer; Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Giessen, Germany
Notice: this page was machine-translated and is pending editorial review.
Visual

Abstract
This paper presents AHRUS, a system that uses parametric ultrasound to make environmental information audible for people with visual impairment or blindness. Through self-demodulation, directional properties of ultrasound are preserved so signals can be perceived with the user's own ears. The contribution describes the technical setup of a prototype and initial usage concepts. In an initial evaluation with four participants, the system was tested in practice. Compared with classic flash-sonar echolocation, the approach shows advantages for small structures and for the stealth issue of smooth surfaces.
Keywords
- Human Echo Localization
- Audible Ultrasound Sonar
- Blind People
- Spatial Hearing
- Obstacle Detection
Download
Figures
13 visuals from the paper.
-
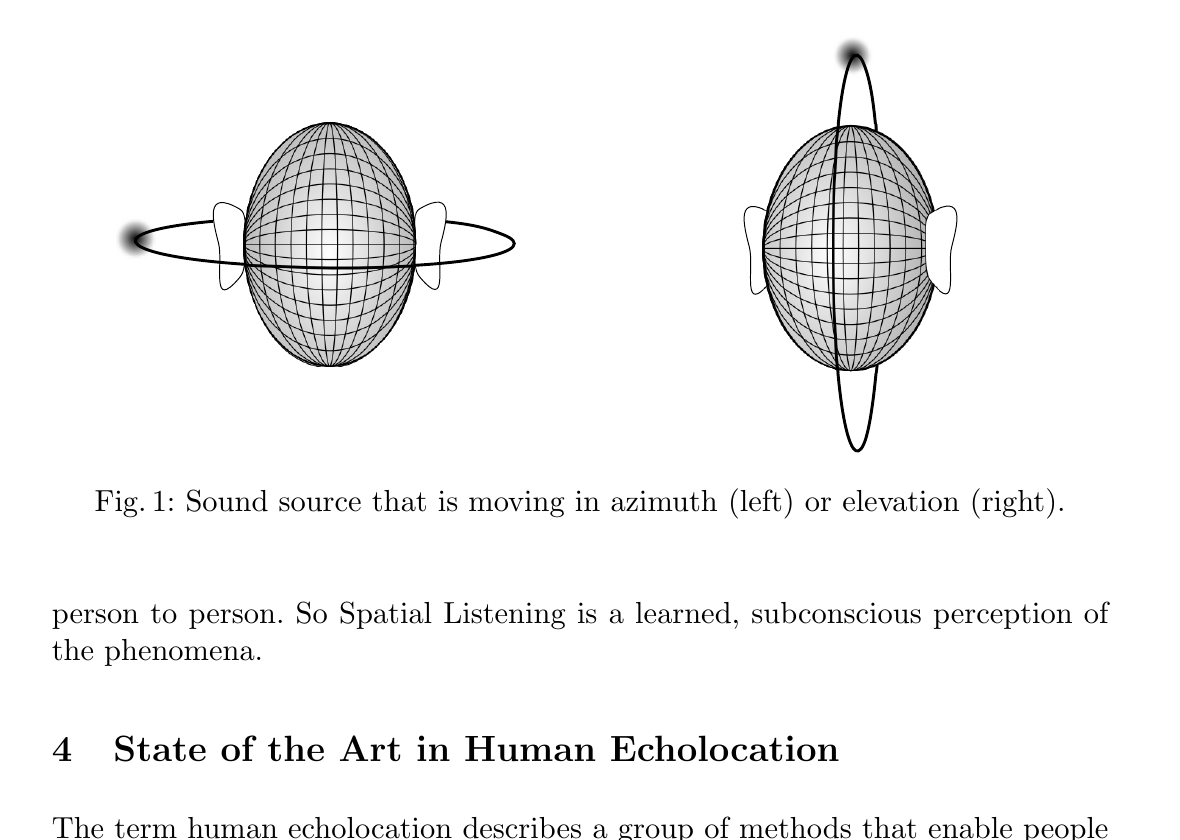
Fig. 1 Overall directional representation. -
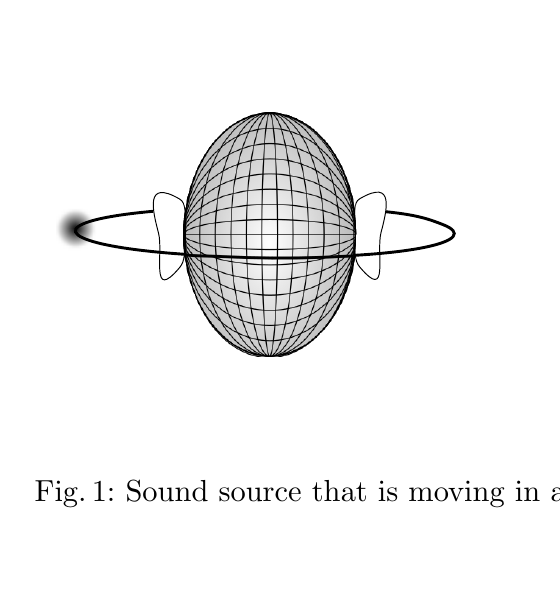
Fig. 1 Detail left (azimuth). -
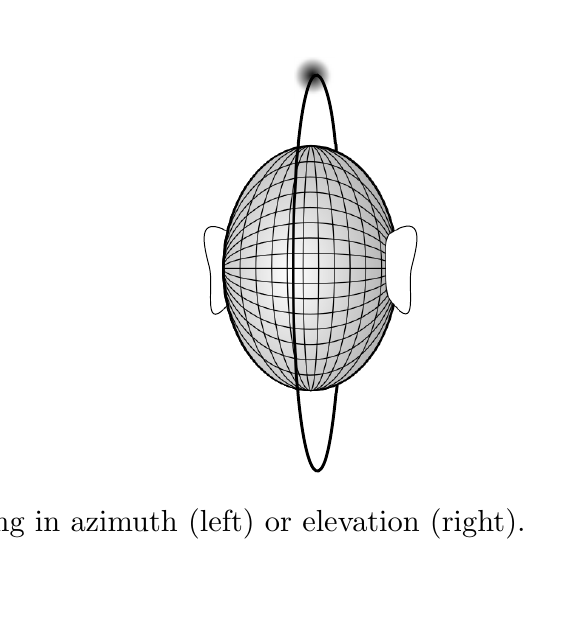
Fig. 1 Detail right (elevation). -
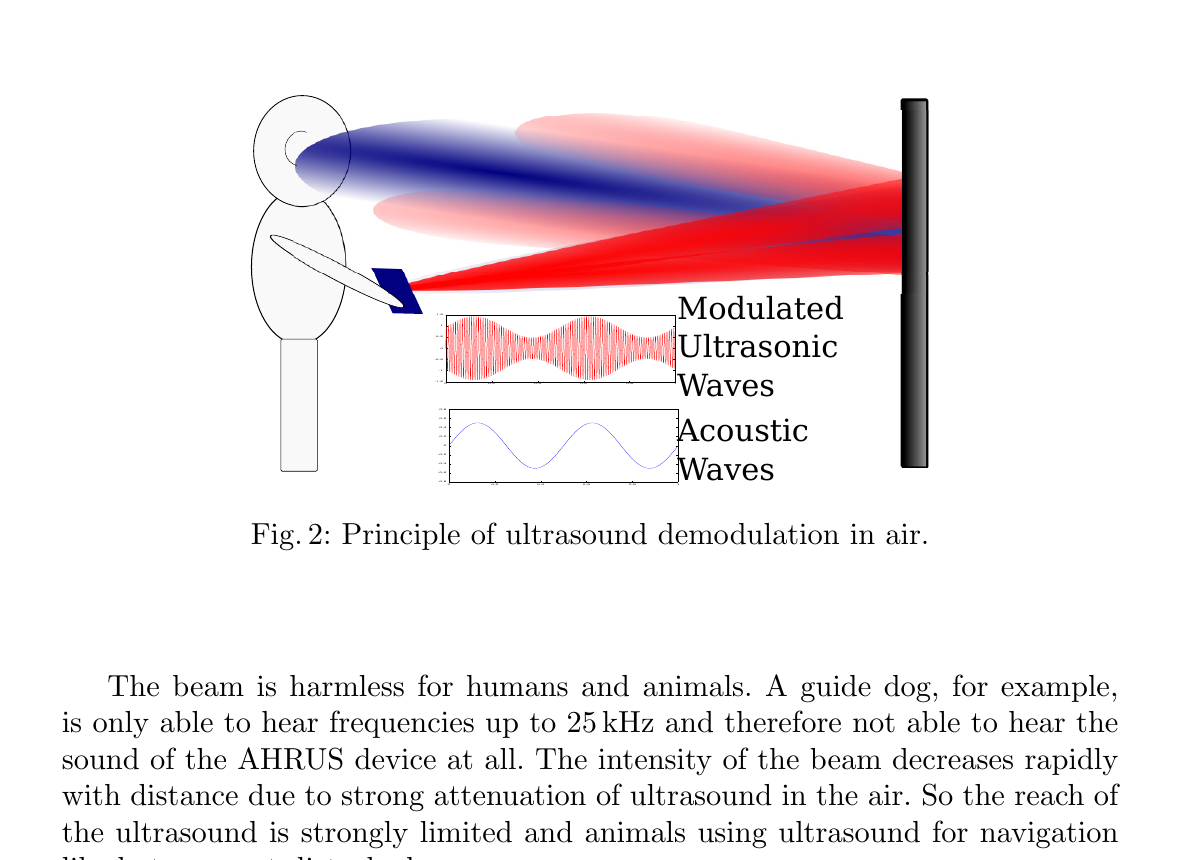
Fig. 2 Principle of ultrasound demodulation. -
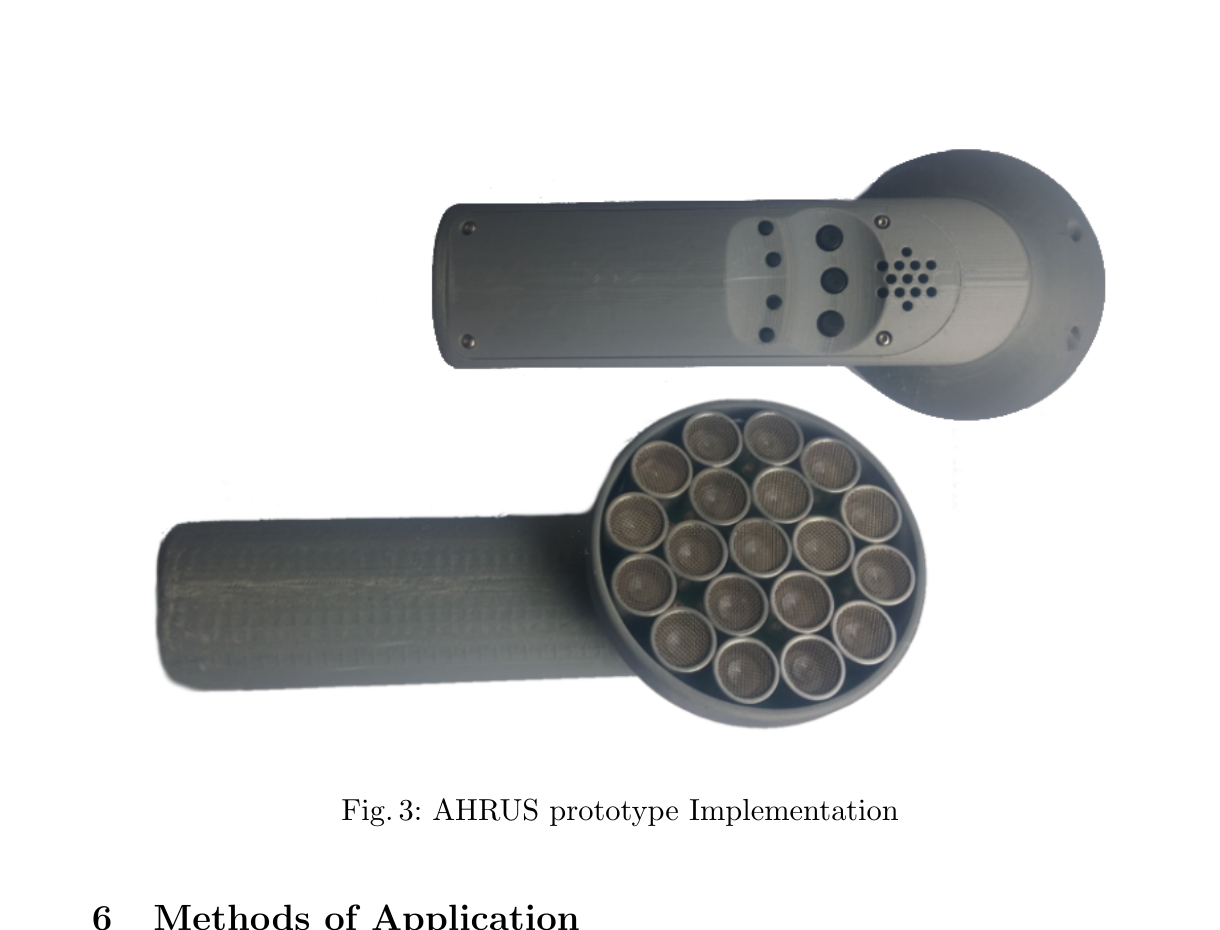
Fig. 3 Prototype implementation. -
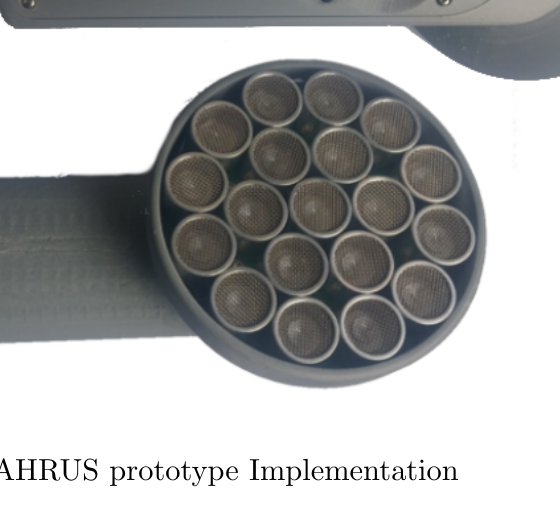
Fig. 3 Transducer array detail. -
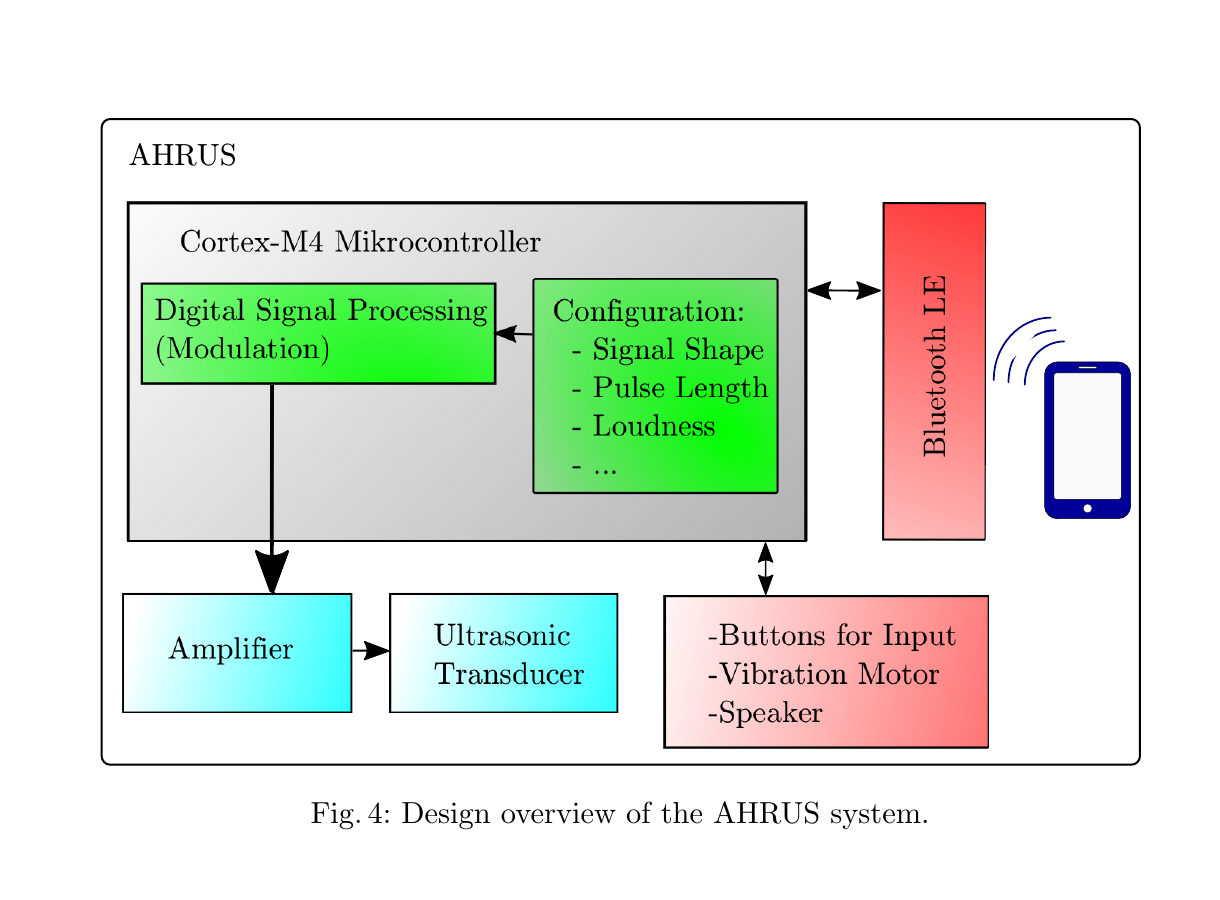
Fig. 4 AHRUS system design overview. -
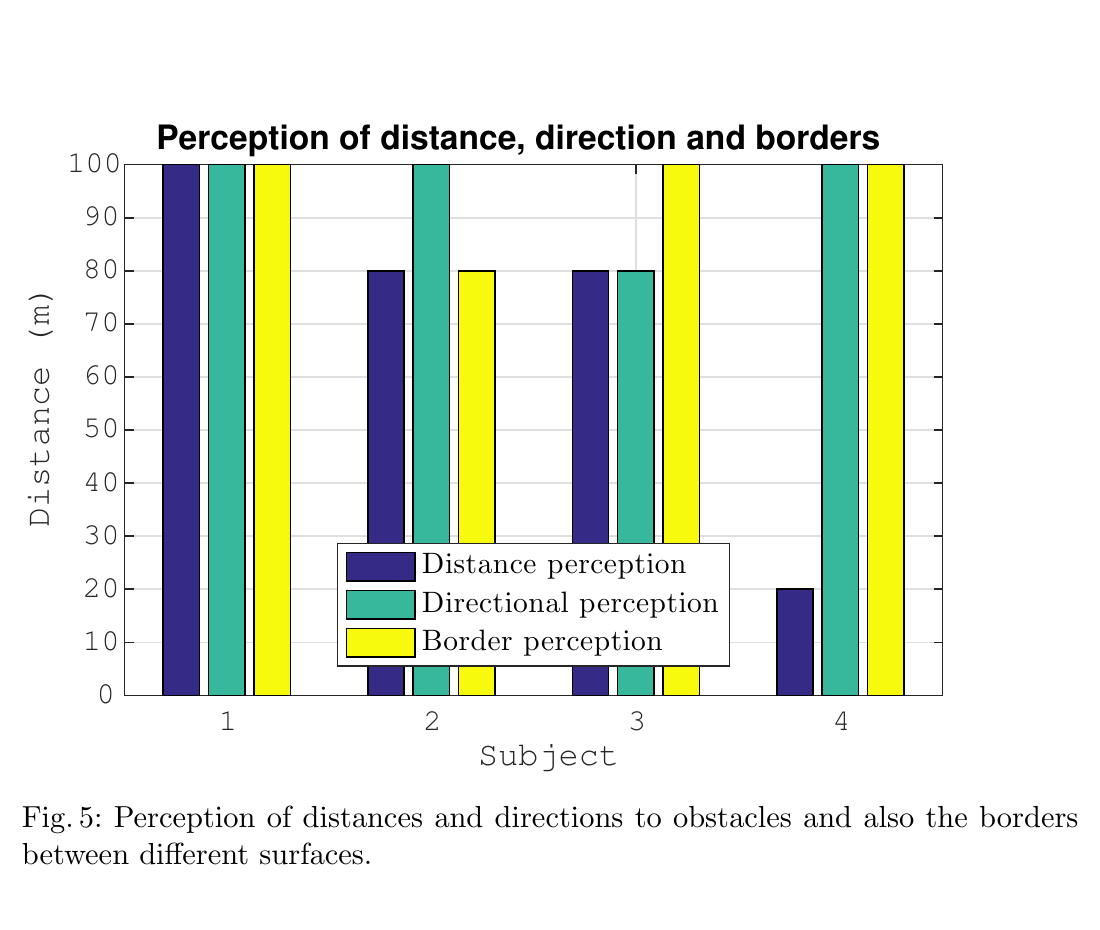
Fig. 5 Results for distance, direction, and boundary perception. -
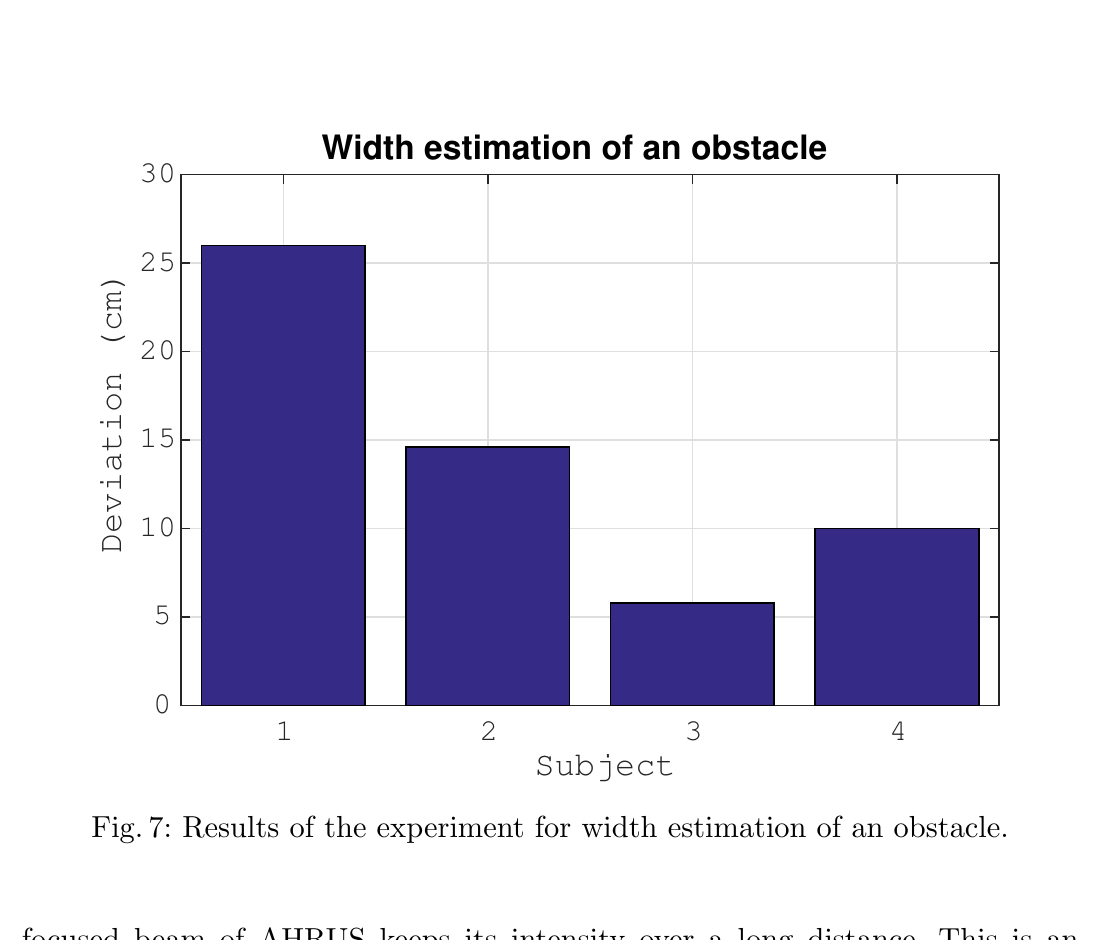
Fig. 6 Distance threshold in obstacle detection. -
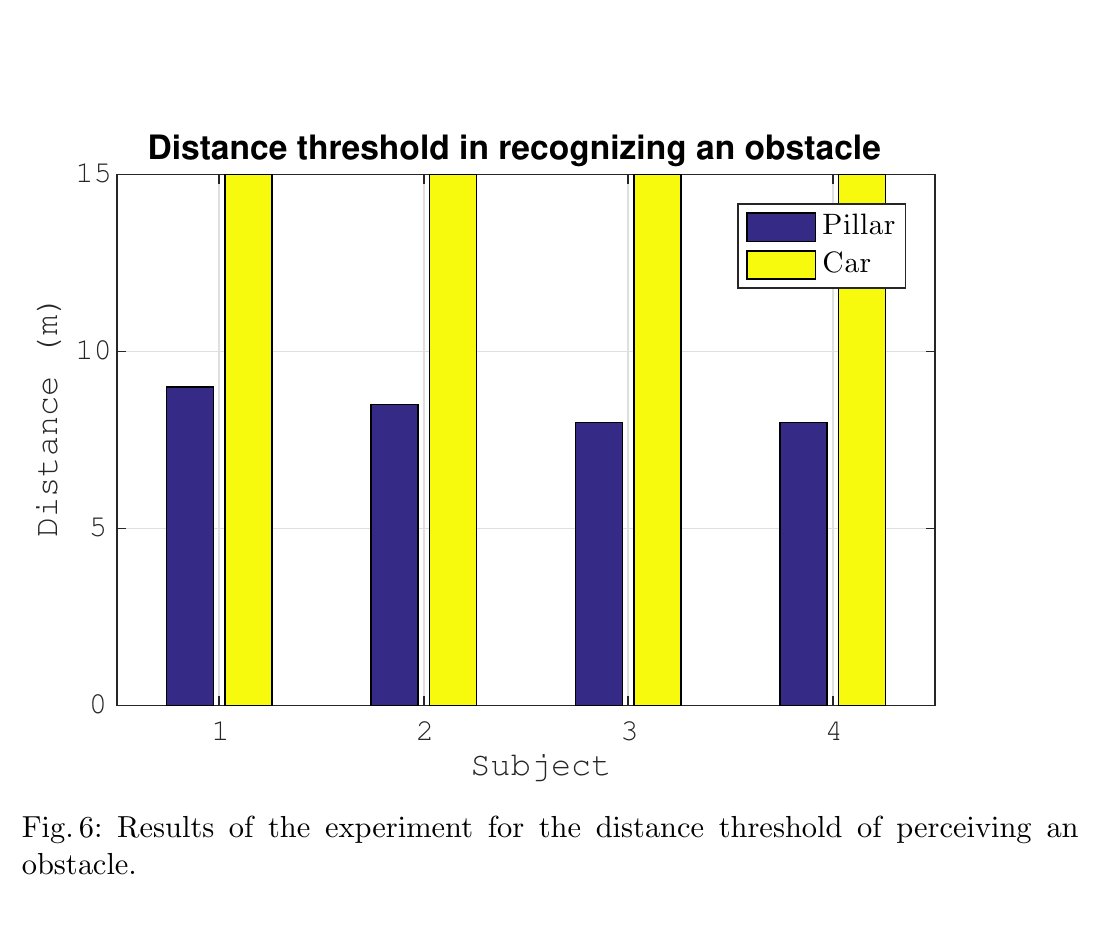
Fig. 7 Obstacle width estimation. -
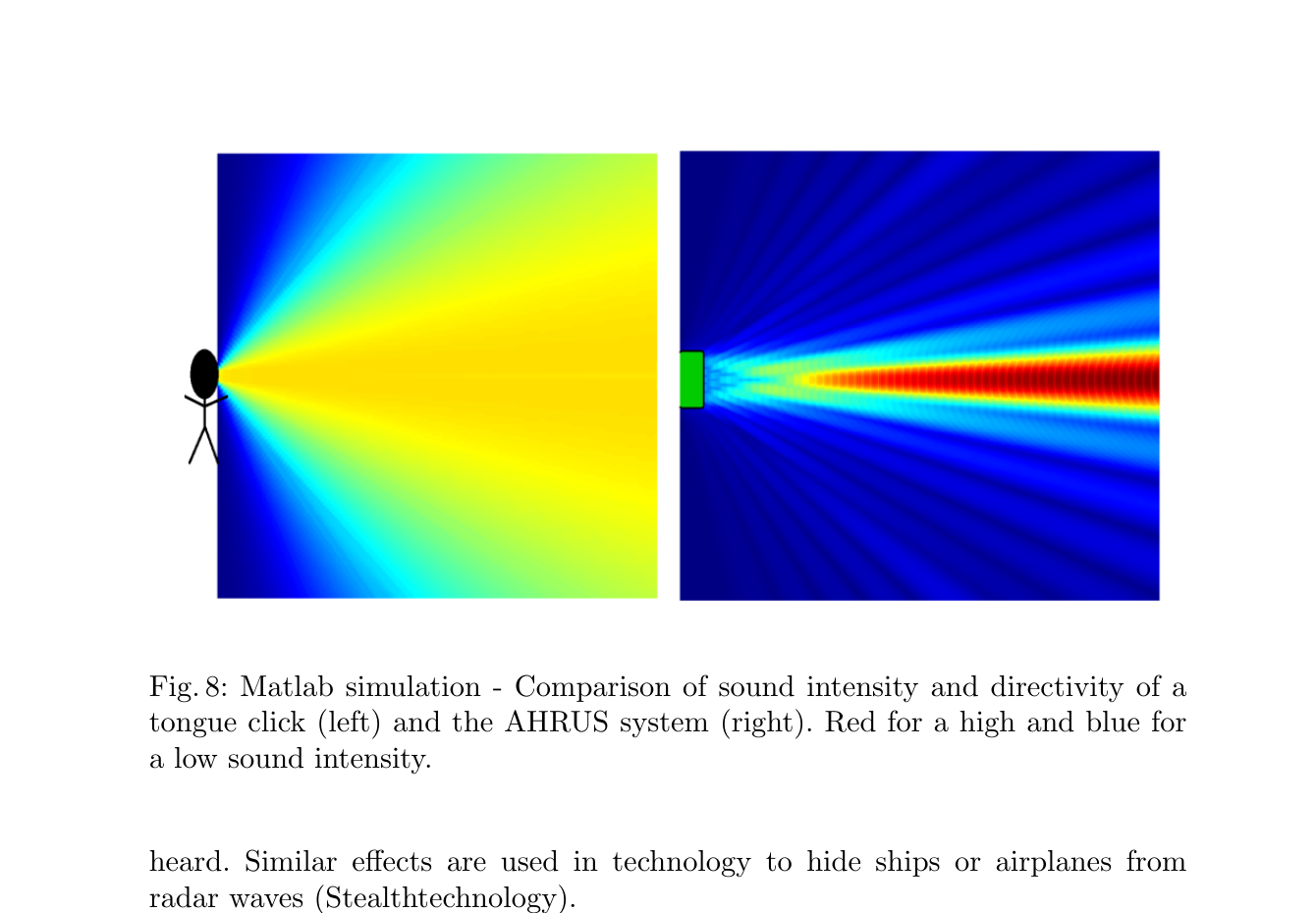
Fig. 8 Overall comparison of directivity. -
Fig. 8 Detail left (flash sonar). -
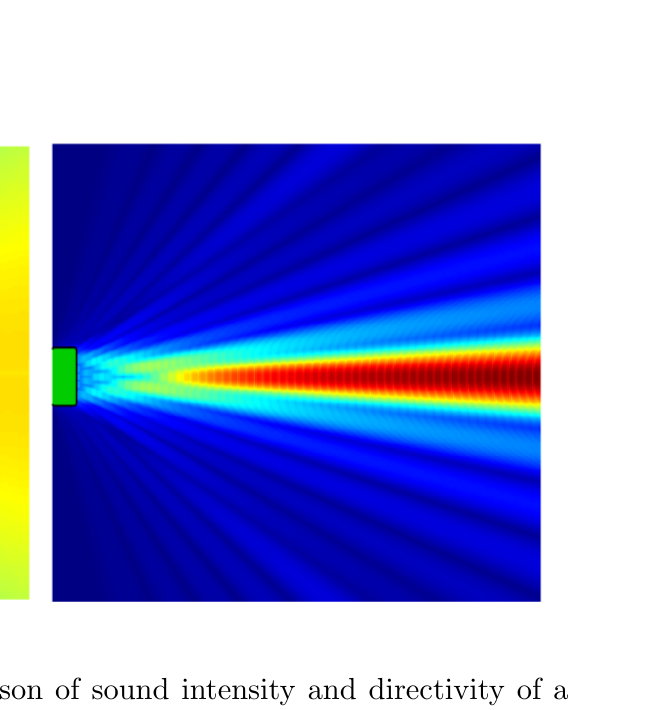
Fig. 8 Detail right (AHRUS).












BibTeX
@inproceedings{vonzabiensky2018ahrus,
title = {Ultrasonic Waves to Support Human Echolocation},
author = {von Zabiensky, Florian and Kreutzer, Michael and Bienhaus, Diethelm},
booktitle = {HCII},
year = {2018}
}
Additional notes
Further reading: Go to the AHRUS project