Proyecto de investigacion Owli-AI
AHRUS Audible High Resolution Ultrasonic Sonar
AHRUS es un concepto de perro guia electronico que apoya la ecolocalizacion mediante ultrasonido audible. El sistema busca hacer perceptibles antes obstaculos y estructuras sin reemplazar la percepcion espacial natural con auriculares.
Aviso: esta pagina fue traducida automaticamente y esta pendiente de revision editorial.
- echolocation
- ultrasound
- assistive technology
- spatial hearing
- obstacle detection
Descripcion del proyecto
Objetivo
El proyecto AHRUS investiga como puede usarse el ultrasonido como canal adicional de orientacion para personas ciegas y con discapacidad visual. El objetivo es apoyo practico en la vida diaria, especialmente ante estructuras pequenas y superficies dificiles de percibir.
Como funciona (resumen)
Se emite un haz de ultrasonido focalizado y modulado, que mediante acustica no lineal en aire se transforma parcialmente en senales audibles. Las reflexiones de objetos pueden percibirse con los propios oidos y ubicarse espacialmente.
Que aporta frente a la ecolocalizacion clasica?
La ecolocalizacion activa clasica con chasquidos de lengua usa longitudes de onda mas largas y es menos selectiva en estructuras finas. AHRUS usa longitudes de onda de ultrasonido cortas y permite exploracion direccional clara, lo que puede mejorar la diferenciacion de limites estructurales y pequenos obstaculos en ciertos escenarios.
Estado actual (prototipo y primeras pruebas)
Existe un prototipo funcional. En una primera evaluacion con cuatro participantes se analizaron distancia, direccion, estimacion de anchura y percepcion de limites, comparandolo con flash sonar clasico.
Resultados
- Publicacion: Ultrasonic Waves to Support Human Echolocation
Figuras
13 visuales del paper AHRUS.
-
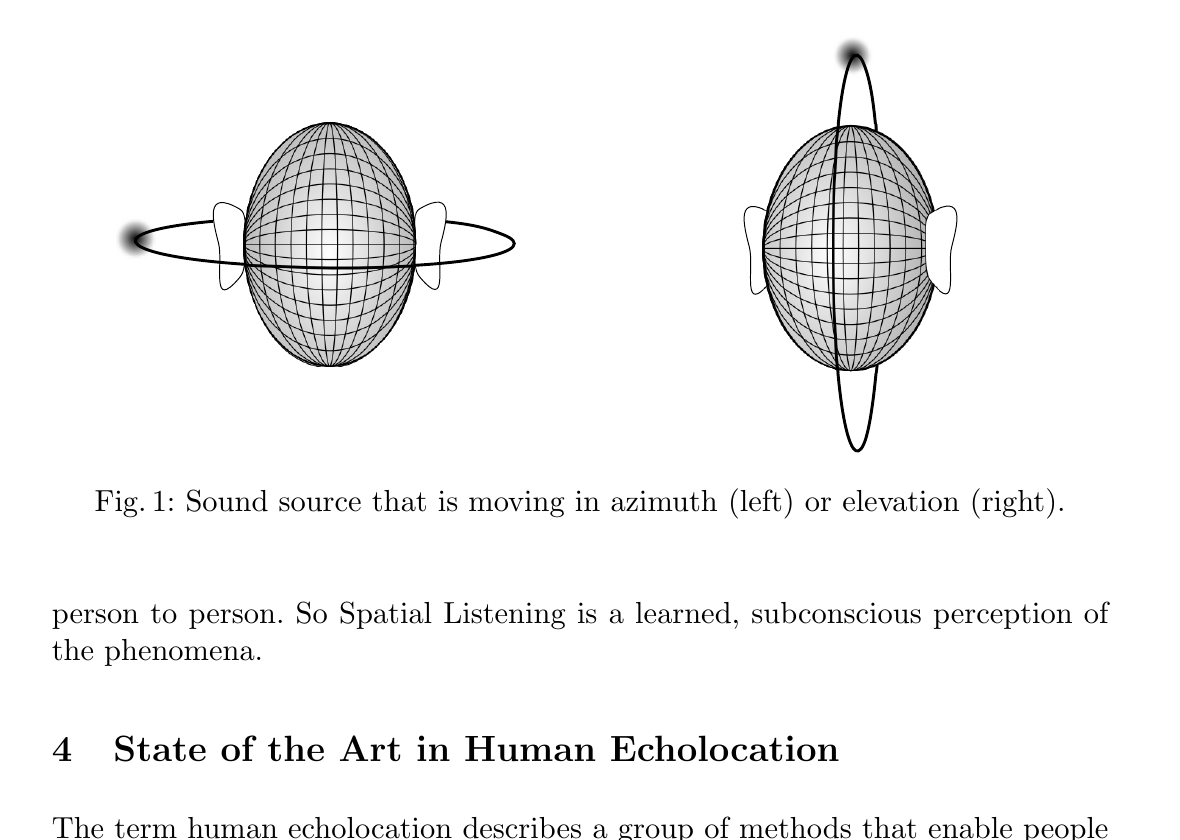
Fig. 1 Vista general de la representacion de direccion. -
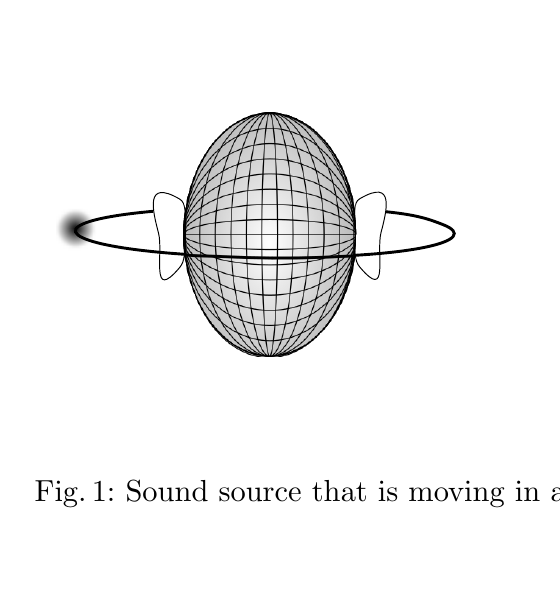
Fig. 1 Detalle izquierdo (acimut). -
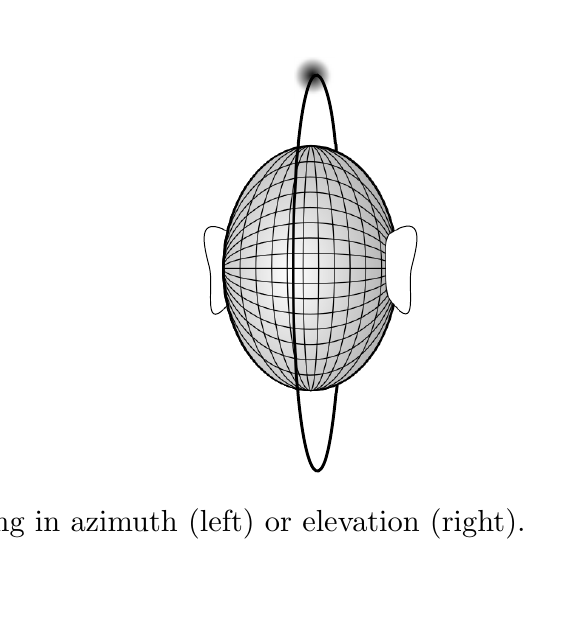
Fig. 1 Detalle derecho (elevacion). -
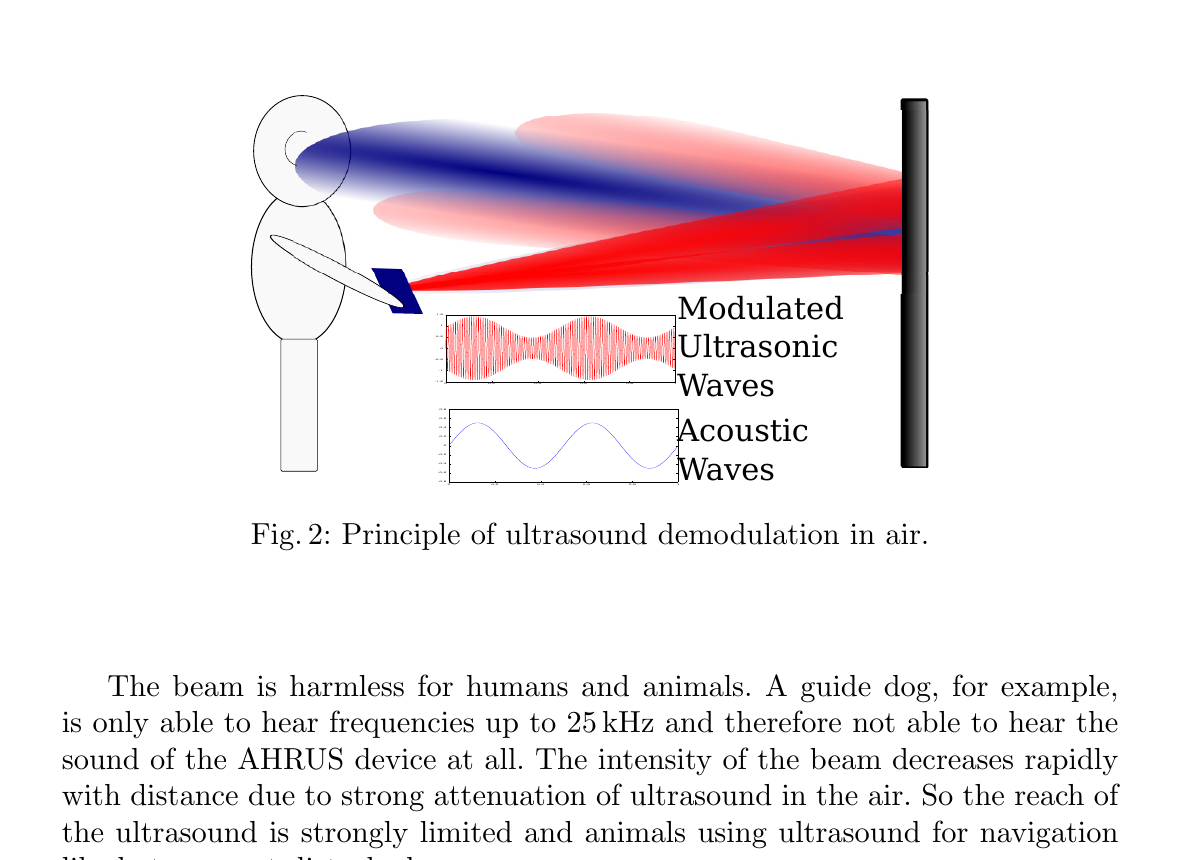
Fig. 2 Principio de demodulacion por ultrasonido. -
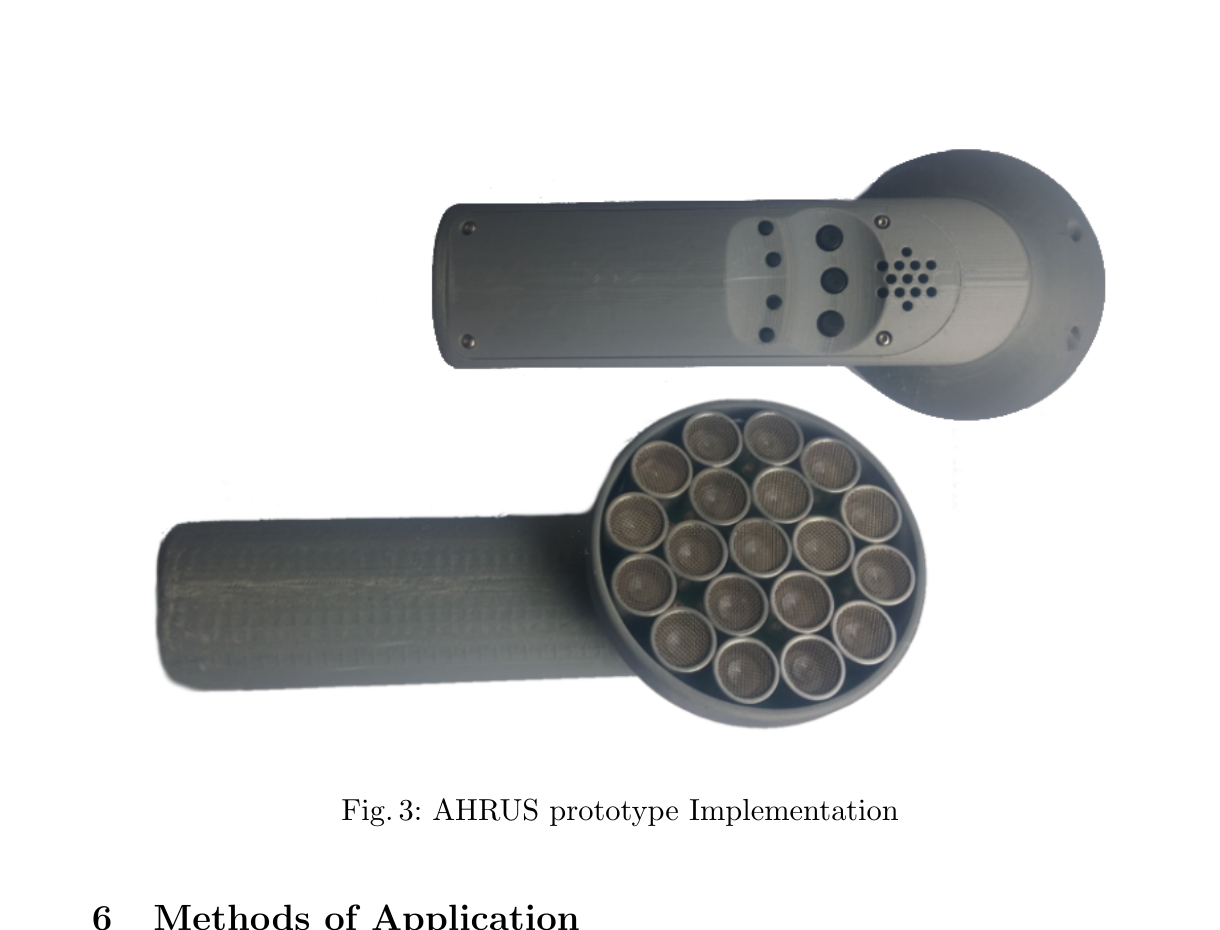
Fig. 3 Implementacion del prototipo. -
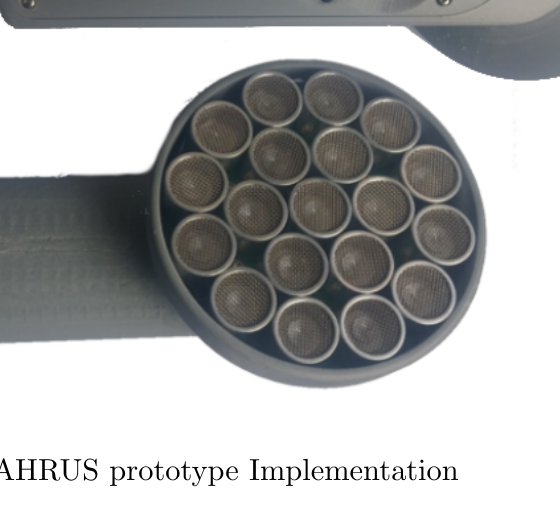
Fig. 3 Detalle de la matriz de transductores. -
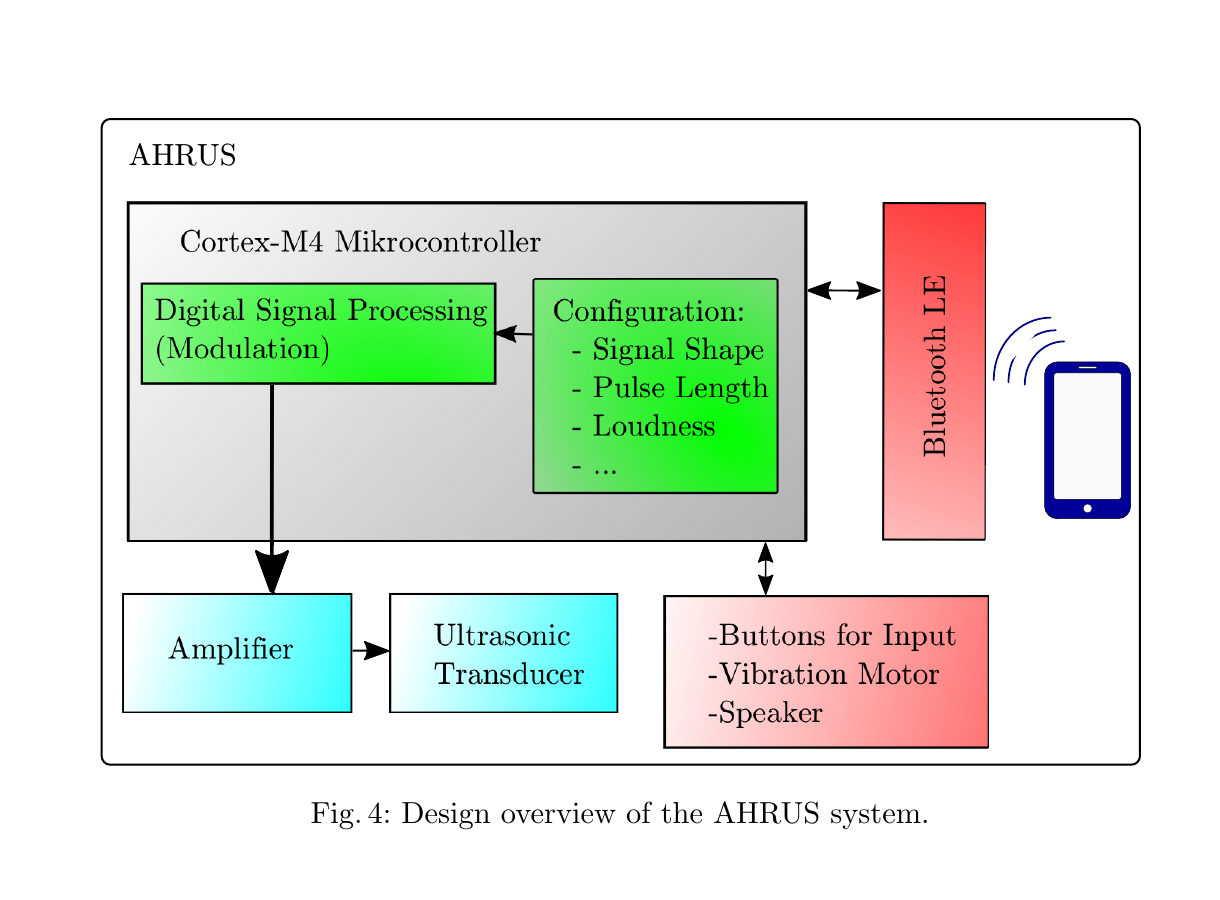
Fig. 4 Vista general del diseno del sistema AHRUS. -
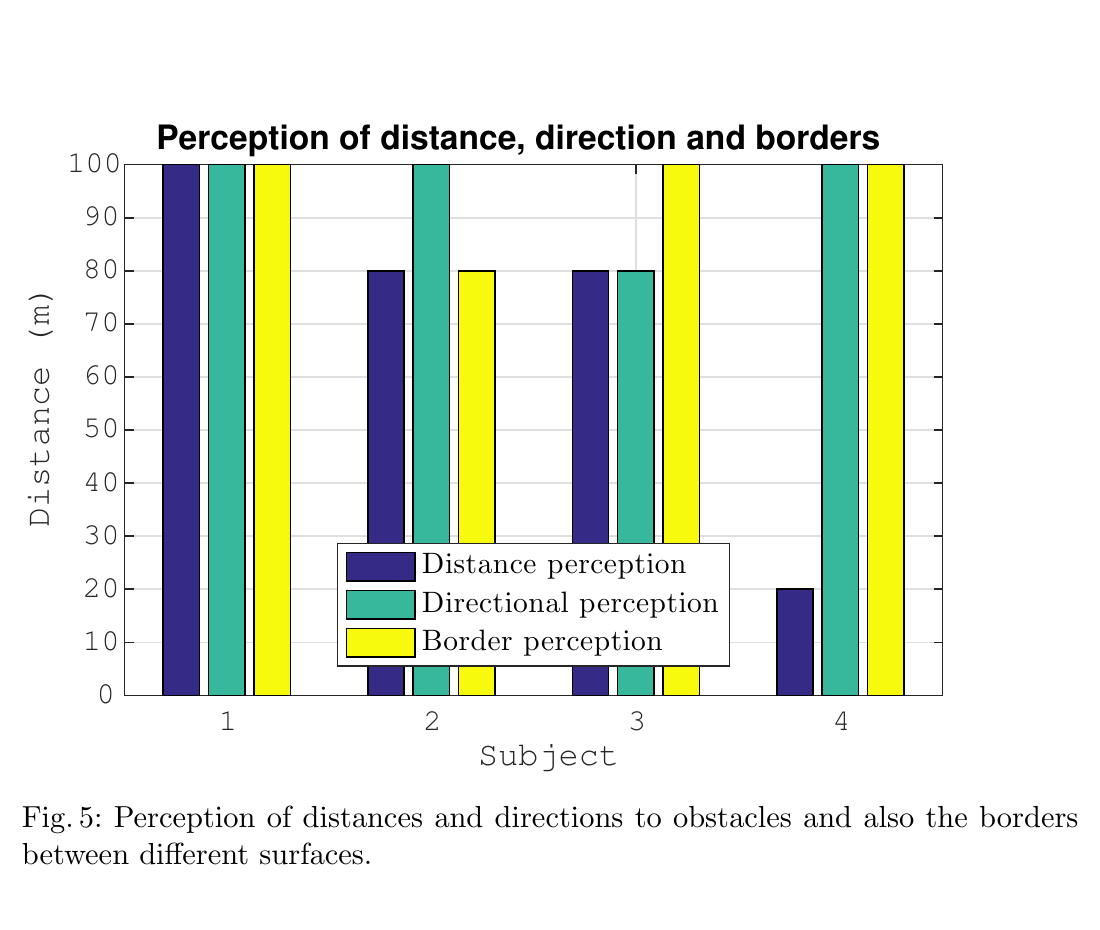
Fig. 5 Resultados sobre percepcion de distancia, direccion y limites. -
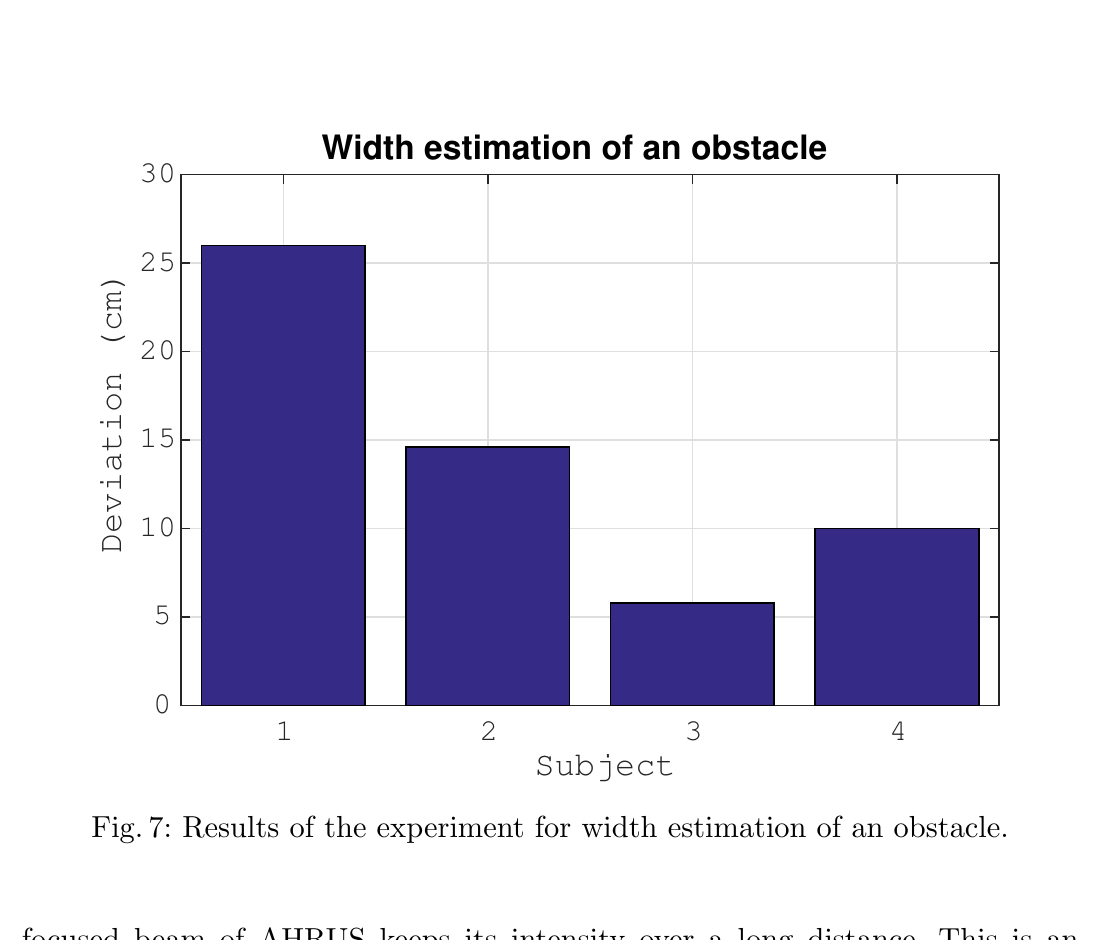
Fig. 6 Umbral de distancia en deteccion de obstaculos. -
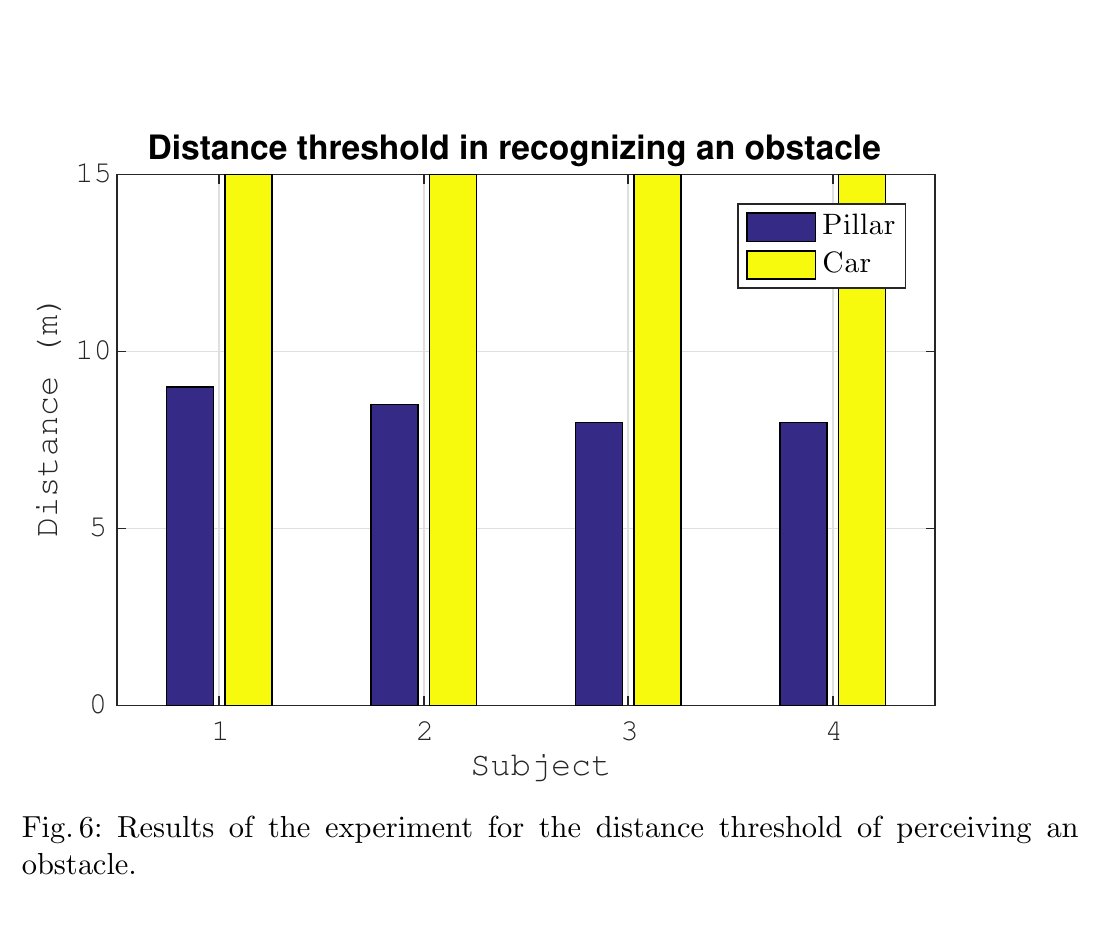
Fig. 7 Estimacion de anchura de un obstaculo. -
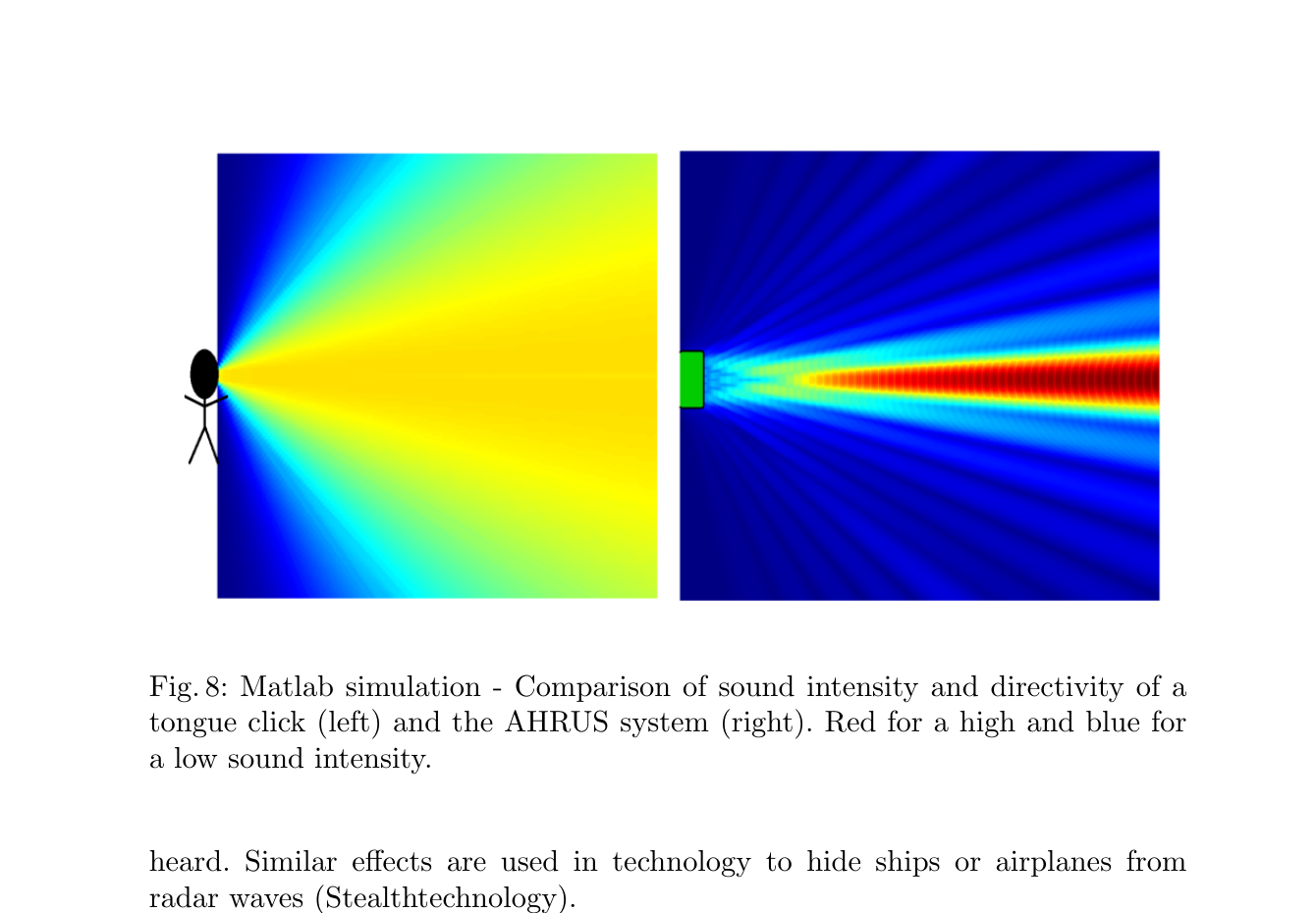
Fig. 8 Comparacion global de directividad. -
Fig. 8 Detalle izquierdo (flash sonar). -
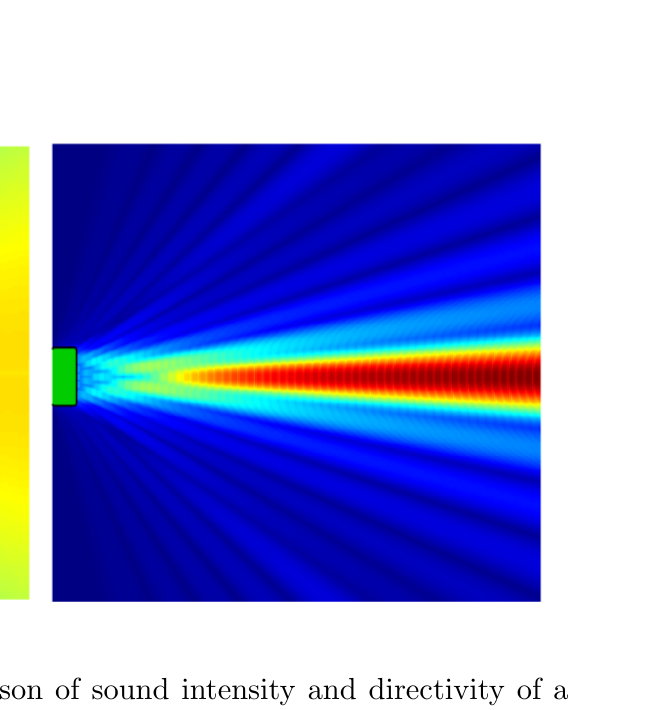
Fig. 8 Detalle derecho (AHRUS).












