Owli-AI Forschungsprojekt
AHRUS Audible High Resolution Ultrasonic Sonar
AHRUS ist ein elektronisches Guide-Dog-Konzept, das Echolokation durch hörbaren Ultraschall unterstützt. Das System soll Hindernisse und Strukturen frühzeitiger wahrnehmbar machen, ohne die natürliche Raumwahrnehmung durch Kopfhörer zu ersetzen.
- echolocation
- ultrasound
- assistive technology
- spatial hearing
- obstacle detection
Projektbeschreibung
Ziel
Das Projekt AHRUS untersucht, wie Ultraschall als zusätzlicher Orientierungskanal für blinde und sehbeeinträchtigte Menschen nutzbar wird. Ziel ist eine praxisnahe Unterstützung im Alltag, besonders bei kleinen Strukturen und schwer wahrnehmbaren Oberflächen.
Wie es funktioniert (kurz)
Ein fokussierter Ultraschallstrahl wird moduliert ausgesendet und durch nichtlineare Akustik in der Luft teilweise in hörbare Signale überführt. Reflektionen von Objekten können dadurch mit den eigenen Ohren wahrgenommen und räumlich eingeordnet werden.
Was ist neu im Vergleich zu klassischer Echolokation?
Klassische aktive Echolokation mit Zungenklick arbeitet mit längeren Wellenlängen und ist dadurch weniger selektiv bei feinen Strukturen. AHRUS nutzt kurze Ultraschallwellen und ermöglicht eine deutlich gerichtete Abtastung, wodurch Strukturgrenzen und kleine Hindernisse in bestimmten Szenarien besser differenzierbar werden.
Aktueller Stand (Prototyp & erste Tests)
Es liegt ein funktionaler Prototyp vor. In einer ersten Evaluation mit vier Teilnehmenden wurden Distanz, Richtung, Breitenabschätzung und Grenzwahrnehmung untersucht und mit klassischem Flash Sonar verglichen.
Outputs
- Publikation: Ultrasonic Waves to Support Human Echolocation
Abbildungen
13 Visuals aus dem AHRUS-Paper.
-
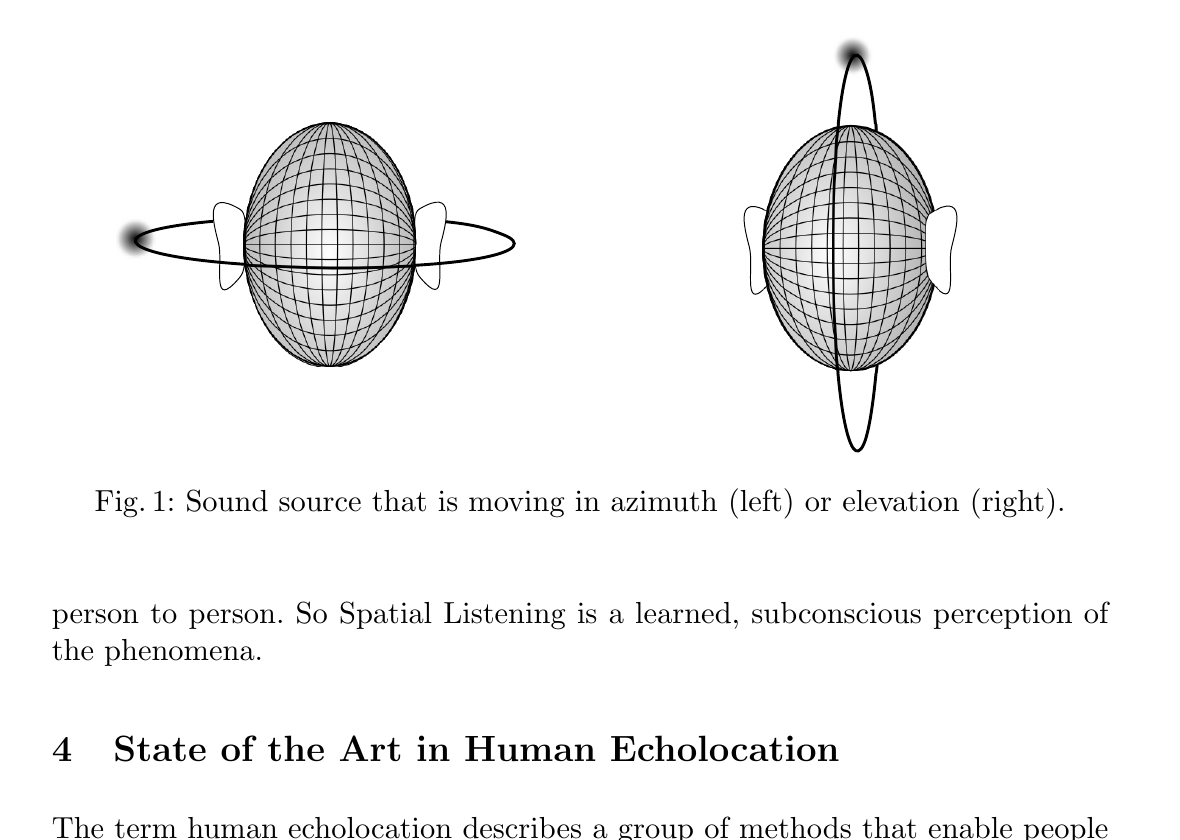
Fig. 1 Gesamtansicht der Richtungsdarstellung. -
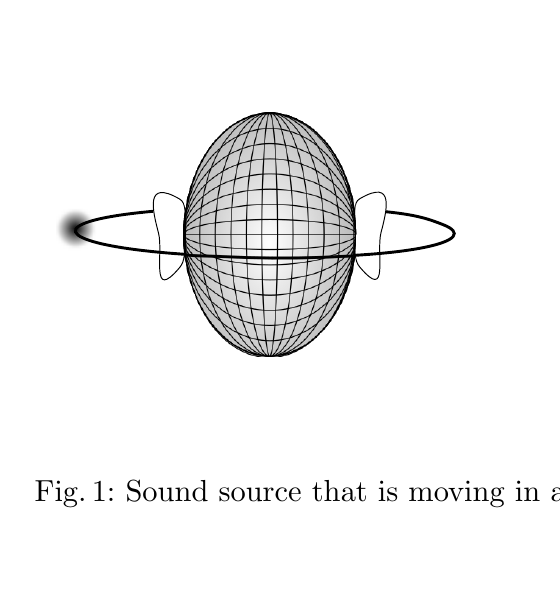
Fig. 1 Detail links (Azimut). -
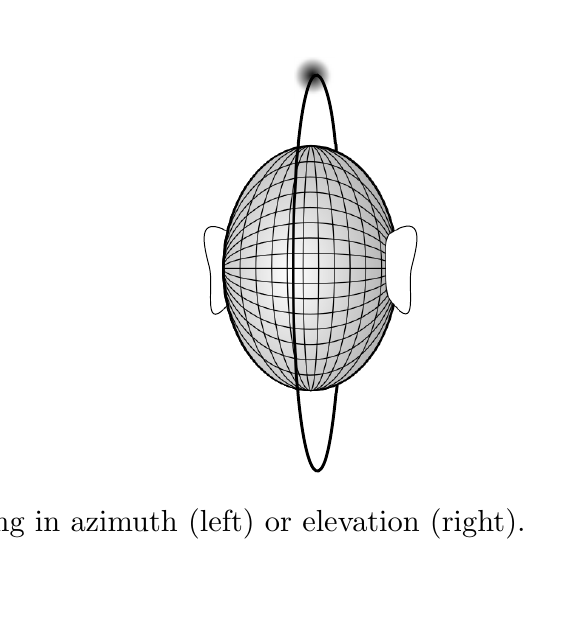
Fig. 1 Detail rechts (Elevation). -
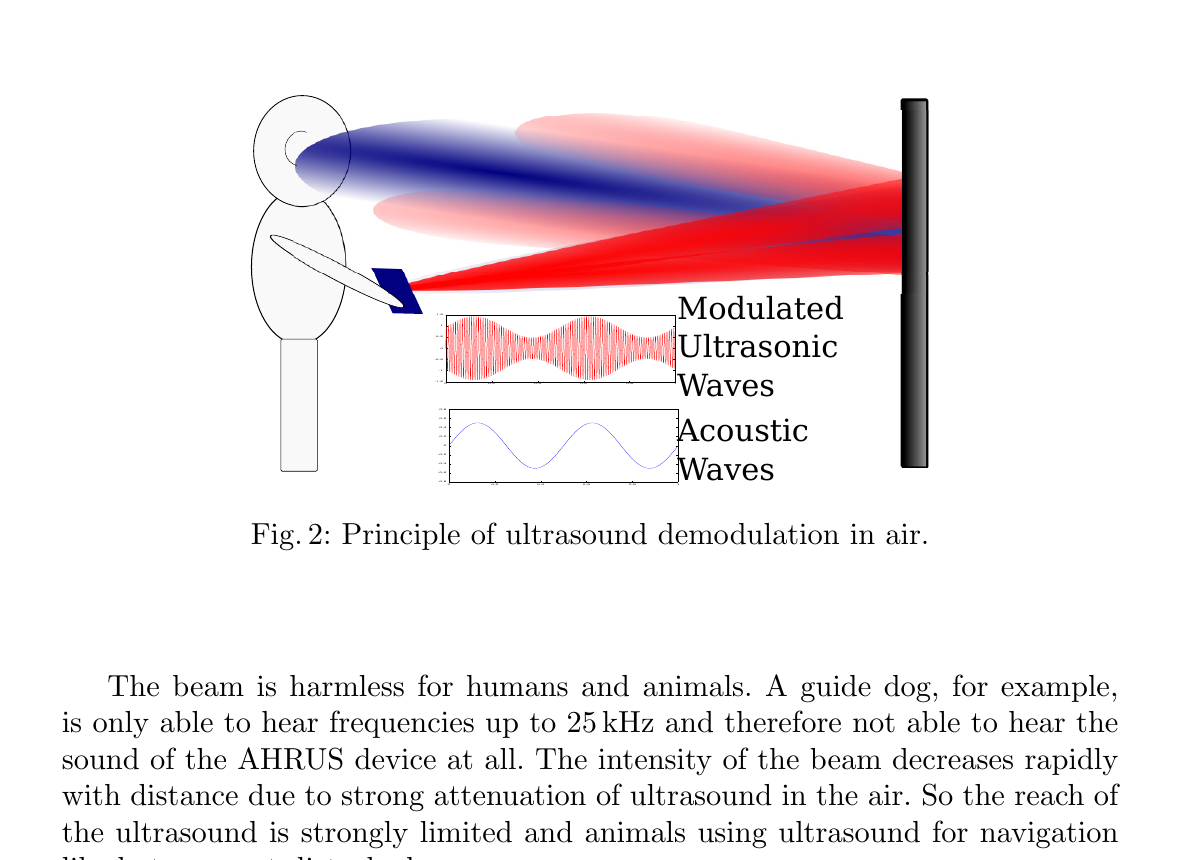
Fig. 2 Prinzip der Ultraschall-Demodulation. -
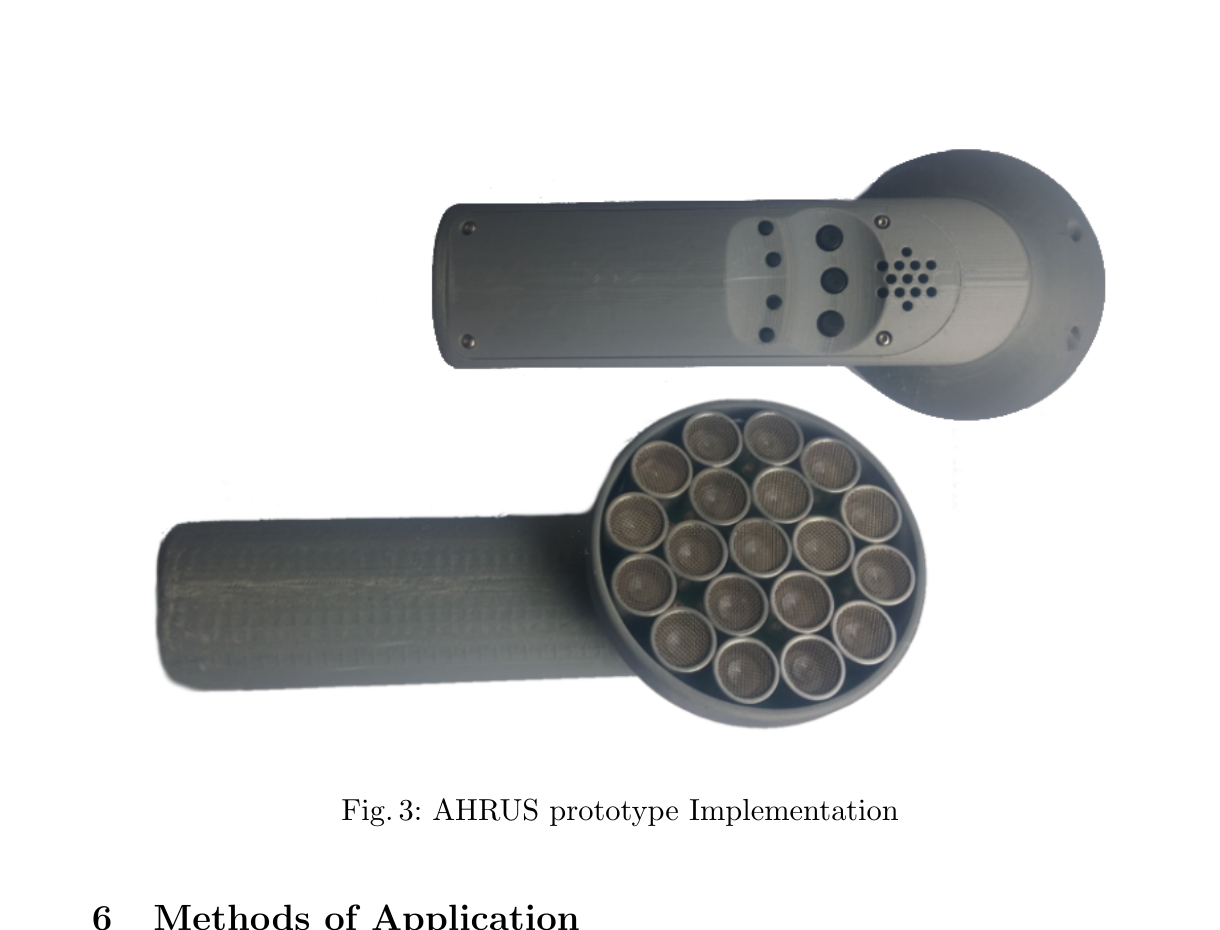
Fig. 3 Prototyp-Implementierung. -
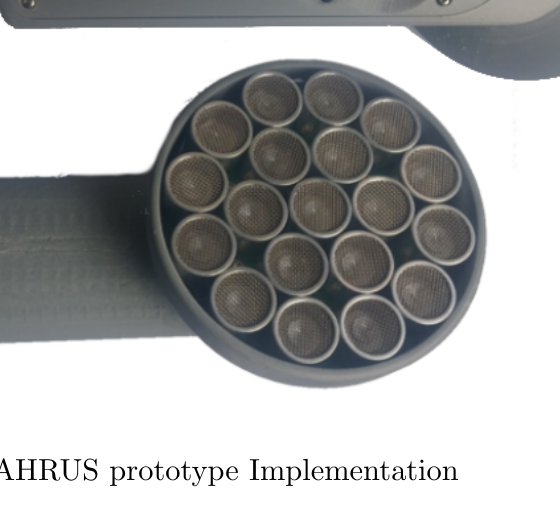
Fig. 3 Detail des Transducer-Arrays. -
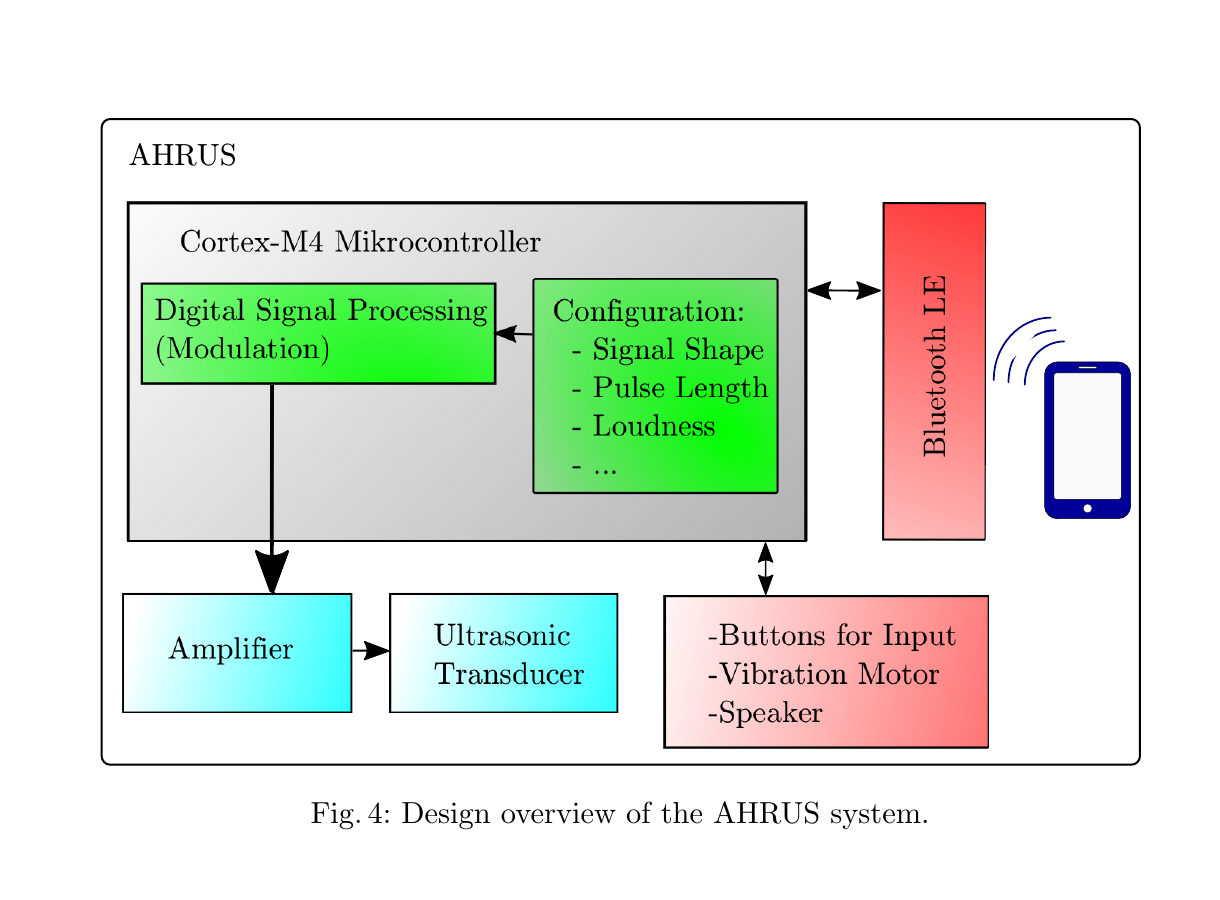
Fig. 4 Design-Übersicht des AHRUS-Systems. -
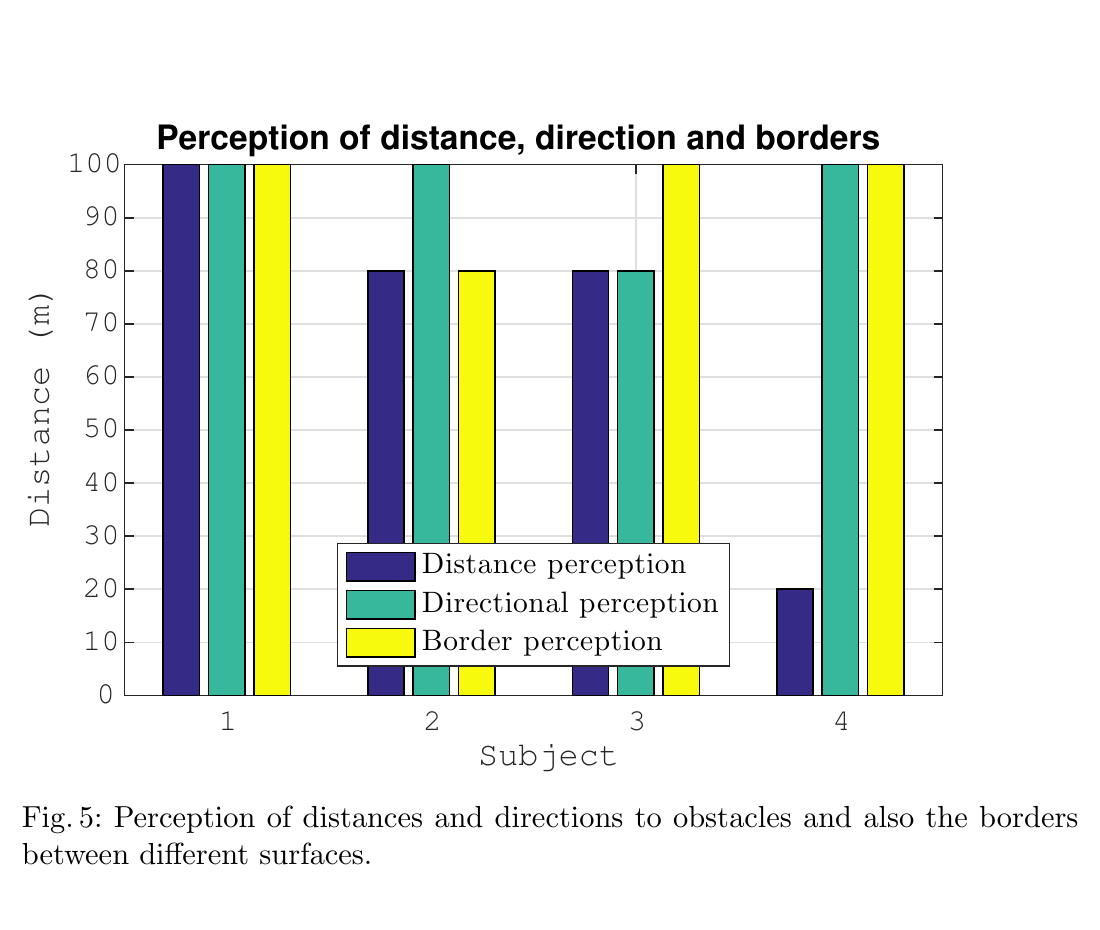
Fig. 5 Ergebnisse zu Distanz-, Richtungs- und Grenzwahrnehmung. -
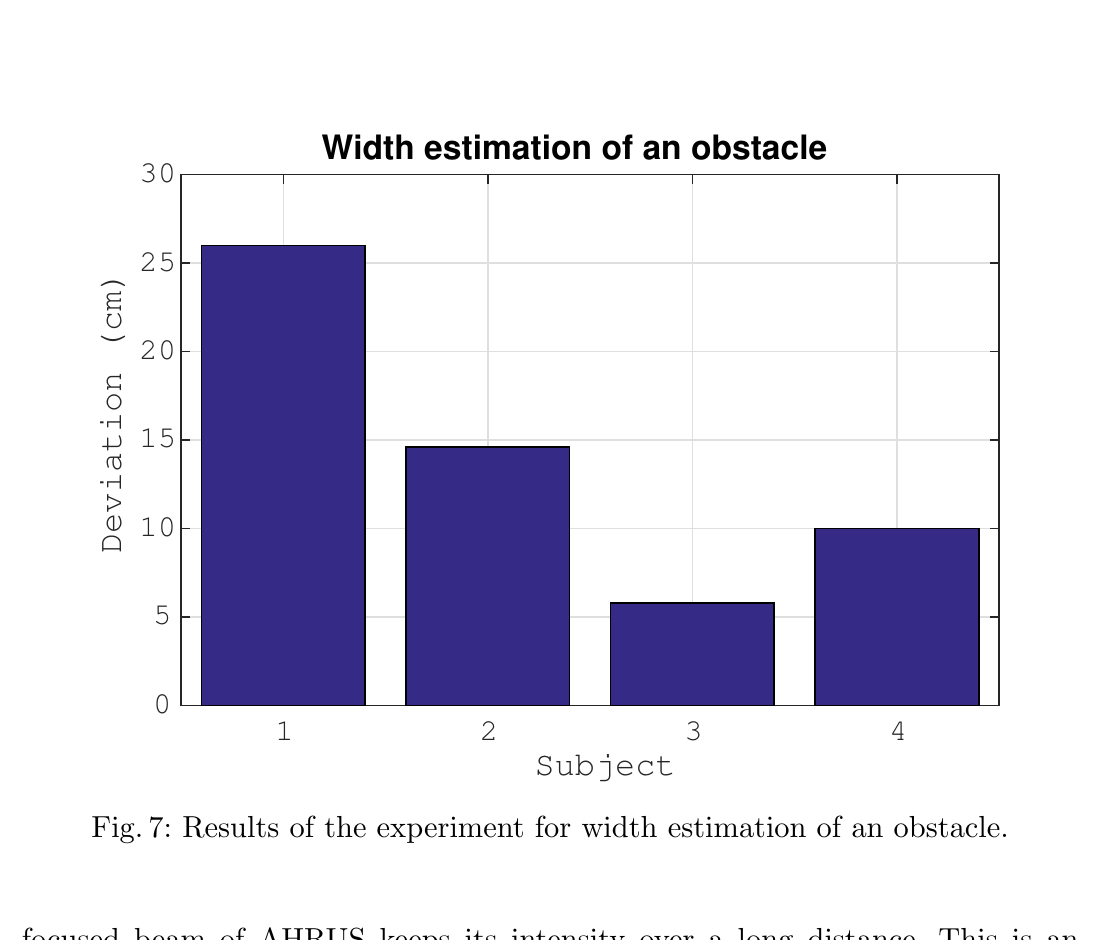
Fig. 6 Distanzschwelle bei der Hinderniserkennung. -
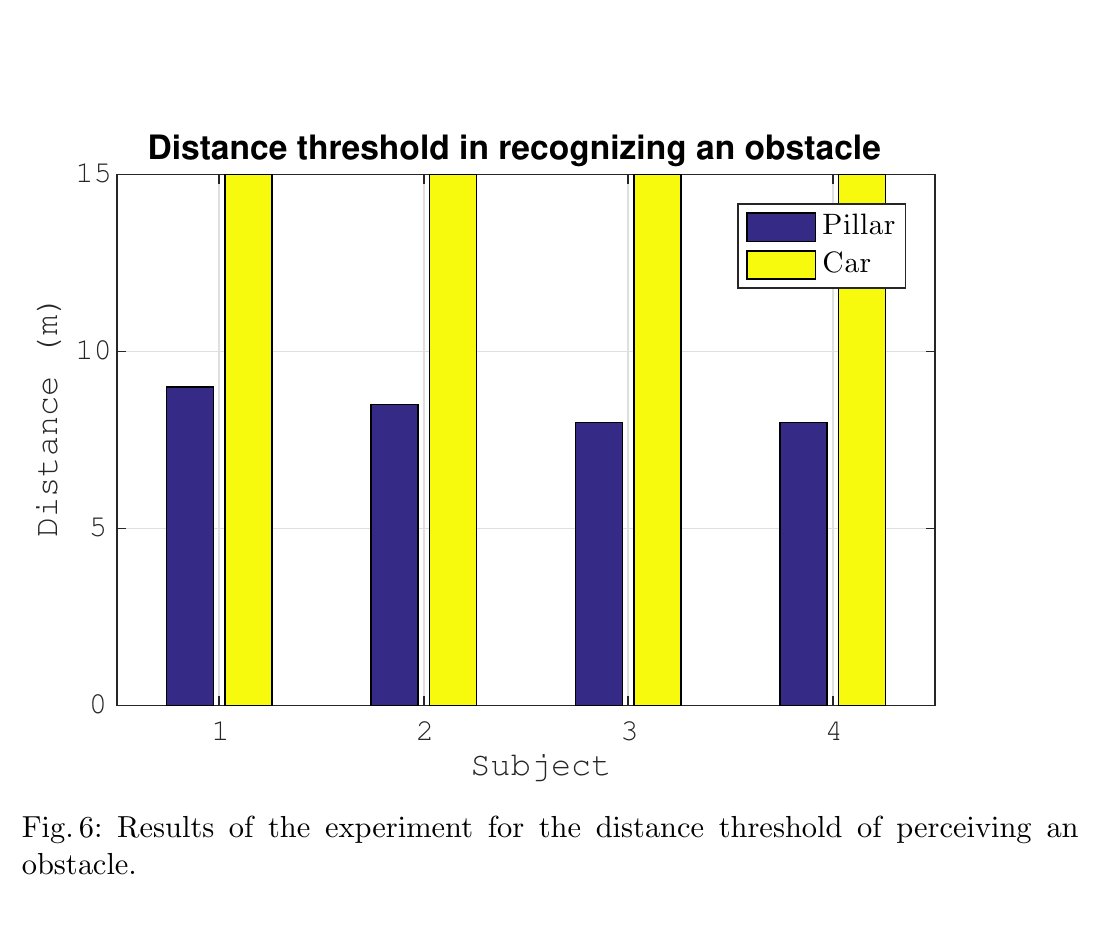
Fig. 7 Breitenabschätzung eines Hindernisses. -
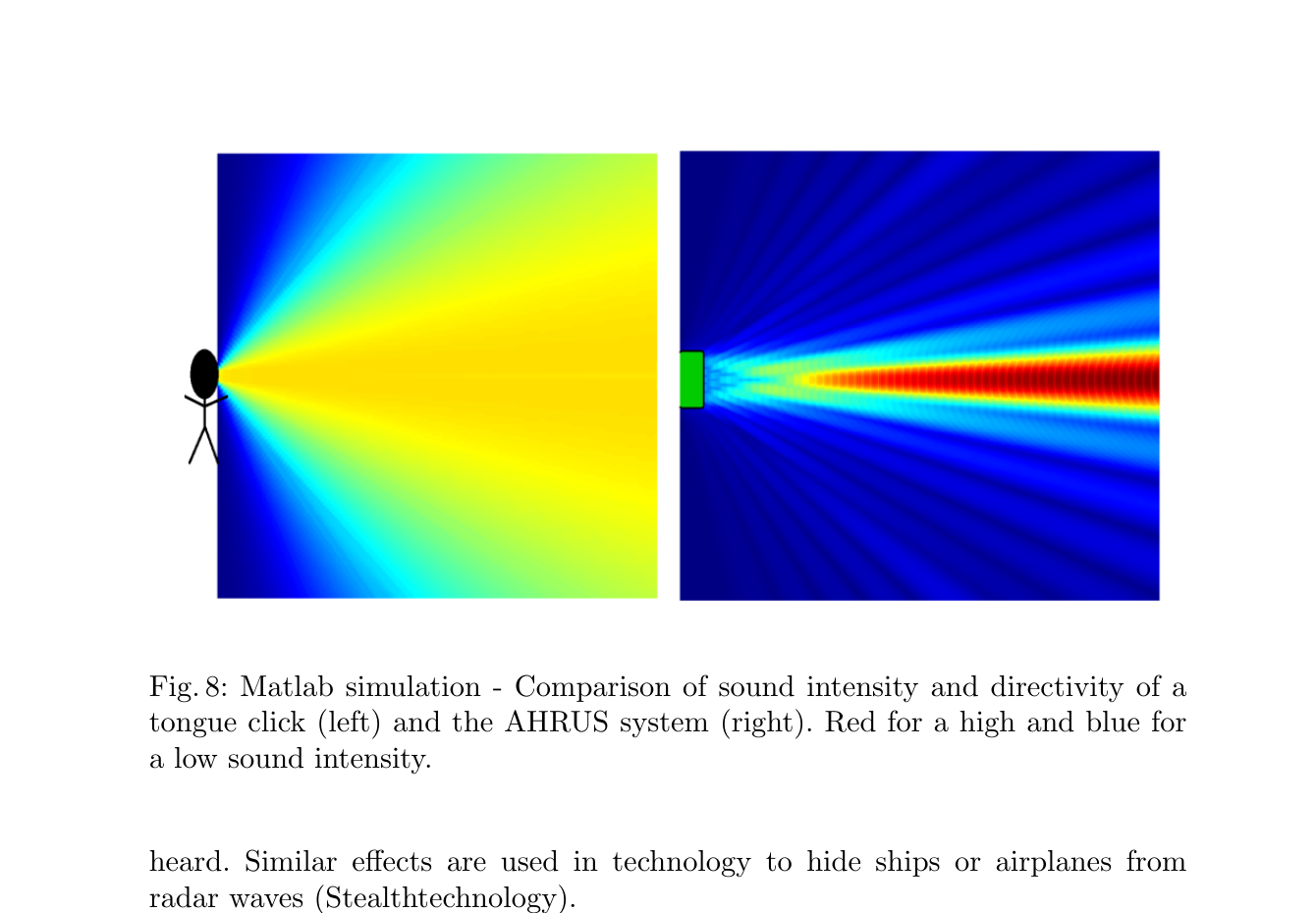
Fig. 8 Gesamtvergleich der Direktivität. -
Fig. 8 Detail links (Flash Sonar). -
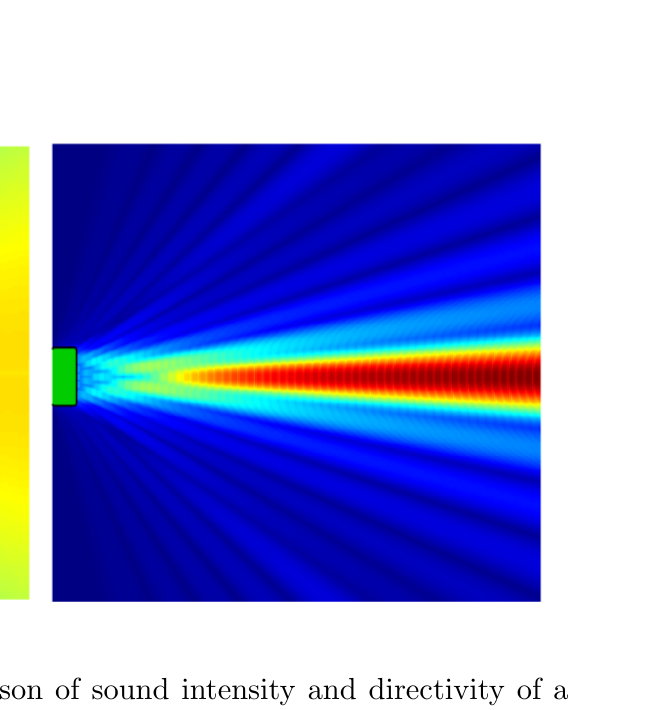
Fig. 8 Detail rechts (AHRUS).












